Page 1 of 1
Module Code: MECH265001 Q4. Using the following components DC Motor -Wheel for autonomous mobile robots H-bridge Voltage
Posted: Tue May 24, 2022 9:57 am
by answerhappygod
- Module Code Mech265001 Q4 Using The Following Components Dc Motor Wheel For Autonomous Mobile Robots H Bridge Voltage 1 (22.27 KiB) Viewed 28 times
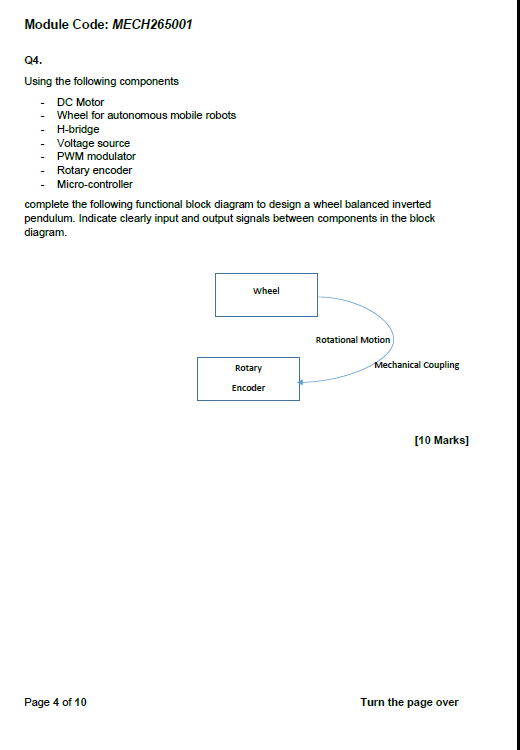
Module Code: MECH265001 Q4. Using the following components DC Motor -Wheel for autonomous mobile robots H-bridge Voltage source PWM modulator - Rotary encoder Micro-controller complete the following functional block diagram to design a wheel balanced inverted pendulum. Indicate clearly input and output signals between components in the block diagram. Wheel Rotational Motion Page 4 of 10 Rotary Encoder Mechanical Coupling [10 Marks] Turn the page over