Page 1 of 1
Determine the dynamic equations of the 2-RR robot (Fig. 1.3) using the Lagrange approach. Note that it is sufficient if
Posted: Sun May 15, 2022 11:32 pm
by answerhappygod
- Determine The Dynamic Equations Of The 2 Rr Robot Fig 1 3 Using The Lagrange Approach Note That It Is Sufficient If 1 (50.95 KiB) Viewed 58 times
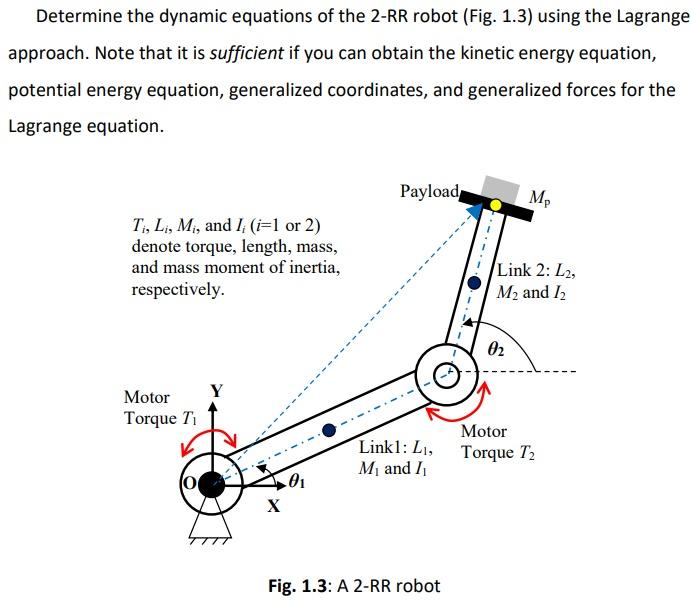
Determine the dynamic equations of the 2-RR robot (Fig. 1.3) using the Lagrange approach. Note that it is sufficient if you can obtain the kinetic energy equation, potential energy equation, generalized coordinates, and generalized forces for the Lagrange equation. Payload Me Ti, Li, M, and I; (i=1 or 2) denote torque, length, mass, and mass moment of inertia, respectively. Link 2: L2, M2 and 12 02 Y Motor Torque T Linkl: L1, M and I Motor Torque T2 0 X Fig. 1.3: A 2-RR robot