- Axis G Al Al 1 E Variable 90 0 D 1c 2 E Vale 90 0 0 3 0 0 0 Ds Variable Step Case 0 Sino Sino Cos 0 0 0 1 0 0 0 1 1 (55.02 KiB) Viewed 20 times
- Axis G Al Al 1 E Variable 90 0 D 1c 2 E Vale 90 0 0 3 0 0 0 Ds Variable Step Case 0 Sino Sino Cos 0 0 0 1 0 0 0 1 2 (30.37 KiB) Viewed 20 times

- Axis G Al Al 1 E Variable 90 0 D 1c 2 E Vale 90 0 0 3 0 0 0 Ds Variable Step Case 0 Sino Sino Cos 0 0 0 1 0 0 0 1 3 (7.63 KiB) Viewed 20 times
- Axis G Al Al 1 E Variable 90 0 D 1c 2 E Vale 90 0 0 3 0 0 0 Ds Variable Step Case 0 Sino Sino Cos 0 0 0 1 0 0 0 1 4 (39.59 KiB) Viewed 20 times
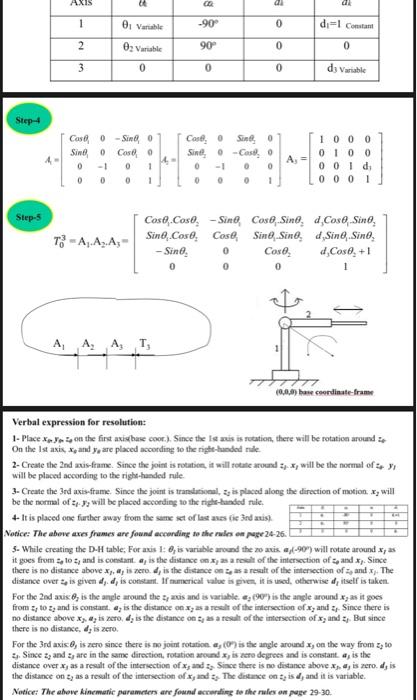
AXIS G al al 1 e Variable -90° 0 d=1C 2 e Vale 90° 0 0 3 0 0 0 ds Variable Step- Case 0 - Sino Sino Cos 0 0 0 1 0 0 0 1 Costo Sino Sinel-Casio 0 -1 0 0 . 1 A = 1000 0100 00 Id 0001 Step-5 73 -A.A.Az- Cose, Cose- Sine, Cose, Sind, d.Cose Sind, Sino Cose, Cose, Sind Sina, d.Sing Sine, -Sin Сохв. d.Cose + 1 0 0 0 0 A A I 1 (0.00) has coordinate-frame Verbal expression for resolution: 1 Place on the first axisbase corr.). Since the Is axis is tetation, there will be rotation around : On the Ist axis and y, are placed according to the night-bandede 2- Create the 2nd axis-femme. Since the joint is rotation, it will rotate und will be the normal of will be placed according to the right-handed rule 3- Create the 3rd axis-frame. Since the joint is translational, as placed along the direction of motiot. xwill be the normal of will be placed according to the right-handed tule. +- It is placed one further away from the same stof last axes die Ind auis) Notice: The above axes frames are found according to the rules on page 24-26 S-While creating the D-8 tableFor axis 1:0, is variable around the no axis. ,-90") will rotate around x; as it goes from to, and is constanta is the distance of the intersection of and x. Since there is no distance above x is zerod, is the distance as a result of the intersection of and The distance over is given ddis constant. If numerical value gives it is used, otherwiseditself is taken For the 2nd axis, is the angle around the ans and is variable, 190") is the angle around x as it goes from to and is constant is the distance on X, as a meal of the intersection of xand 2 Since there is no distance above xx szerodis the distance, as a result of the intersection of and But since there is no distance, dis zero For the 3rd axis, is zero since there is no joint rotation ay() is the angle around on the way from to 3. Since 22 and are in the same direction, rotation around x, is zer degrees and is constanta, is the distance over x as a result of the intersection of x, and Since there is no distance above x is zerody is the distance on 2, as a result of the intersection of x, and the distance on, is d, and it is variable. Notice: The above kinematic parameters are found according to the rules on page 29-30
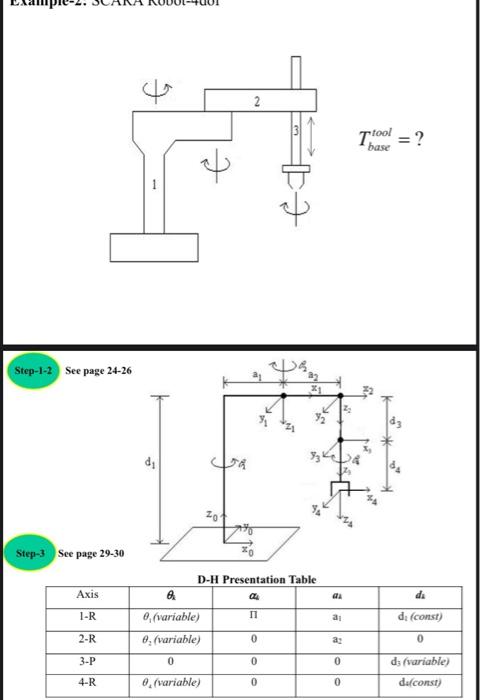
5 2 2 Tool = ? base Step-1-2 See page 24-26 21 2 d. d 14 3D4 20 기 Step-3 See page 29-30 D-H Presentation Table Axis di 1-R п ai d. (const) 2-R 0 a: 0 (variable) 8. (variable) 0 variable) 3-P 0 0 ds (variable) deſconst) 4-R 0 0
HW-18: Express Example-2 verbally step by step as in Example-1? (see page 39 for help)
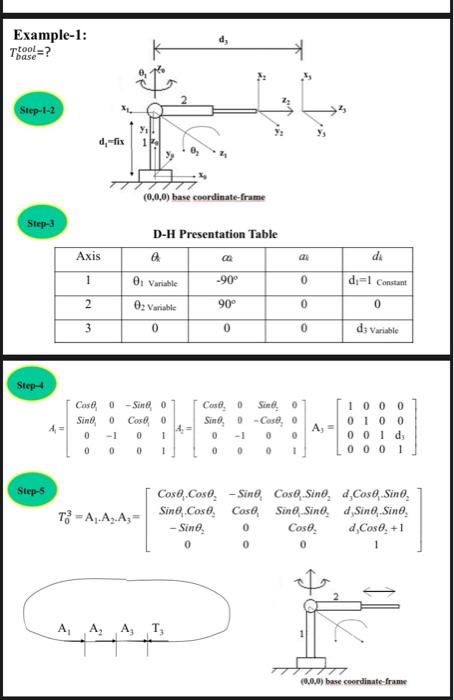
Example-1: 15 Step-1-2 1 i 1 (0,0,0) base coordinate-frame Step- D-H Presentation Table Axis aa d 1 0 Variable -90° 0 d=1 Constant 2 02 Variable 90° 0 0 3 0 0 0 ds Variable Step- Cose Sind 0 0 4 0-Sine 0 0 Cos 0 -1 0 1 0 0 1 Cose, o Sin 0 -1 4.- Simbo -Cose, o 0 0 0 1 A, 1000 0100 00 Id 0001 0 0 Step- T3 -A.A.A, - Cose, Cose, - Sine, Case Sino, d.Cose.Sino, Sine,Cose, Cose, Sine Sine, d,Sind, Sine. - Sine 0 Cose d.Cose, +1 0 0 1 0 A A AT, (0.0.0) base coordinate-frame