Page 1 of 1
CP11.4 The following model has been proposed to de- scribe the motion of a constant-velocity rocket: 0 1 0 0 0 0 -0.1 -0
Posted: Fri Apr 29, 2022 10:04 am
by answerhappygod
- Cp11 4 The Following Model Has Been Proposed To De Scribe The Motion Of A Constant Velocity Rocket 0 1 0 0 0 0 0 1 0 1 (56.59 KiB) Viewed 19 times
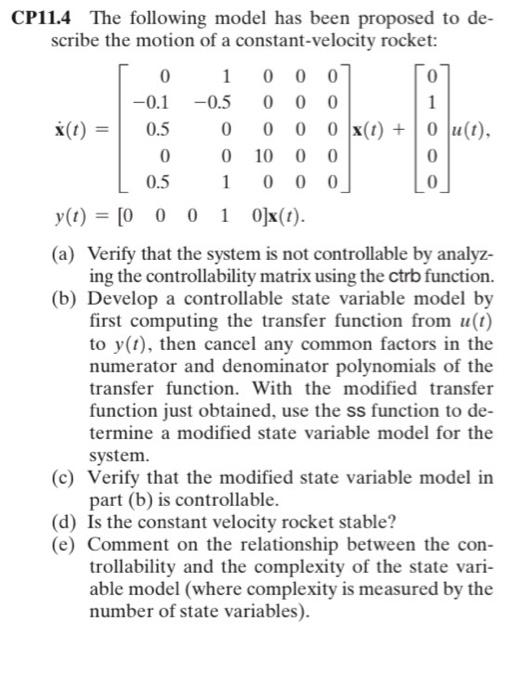
CP11.4 The following model has been proposed to de- scribe the motion of a constant-velocity rocket: 0 1 0 0 0 0 -0.1 -0.5 0 0 0 1 0.5 0 0 0 0 X(t) + Ou(t), 0 0 10 0 0 0 0.5 1 0 0 0 0 y(t) = [0 0 0 1 0]x(t). (a) Verify that the system is not controllable by analyz- ing the controllability matrix using the ctrb function. (b) Develop a controllable state variable model by first computing the transfer function from u(t) to y(t), then cancel any common factors in the numerator and denominator polynomials of the transfer function. With the modified transfer function just obtained, use the ss function to de- termine a modified state variable model for the system. (c) Verify that the modified state variable model in part (b) is controllable. (d) Is the constant velocity rocket stable? (e) Comment on the relationship between the con- trollability and the complexity of the state vari- able model (where complexity is measured by the number of state variables).