Page 1 of 1
Consider a Two Link Robot Arm model as shown in Figure 1. The motor torque M1 and M2 are applied at the hinges A and C r
Posted: Fri Apr 29, 2022 9:49 am
by answerhappygod
- Consider A Two Link Robot Arm Model As Shown In Figure 1 The Motor Torque M1 And M2 Are Applied At The Hinges A And C R 1 (244.57 KiB) Viewed 19 times
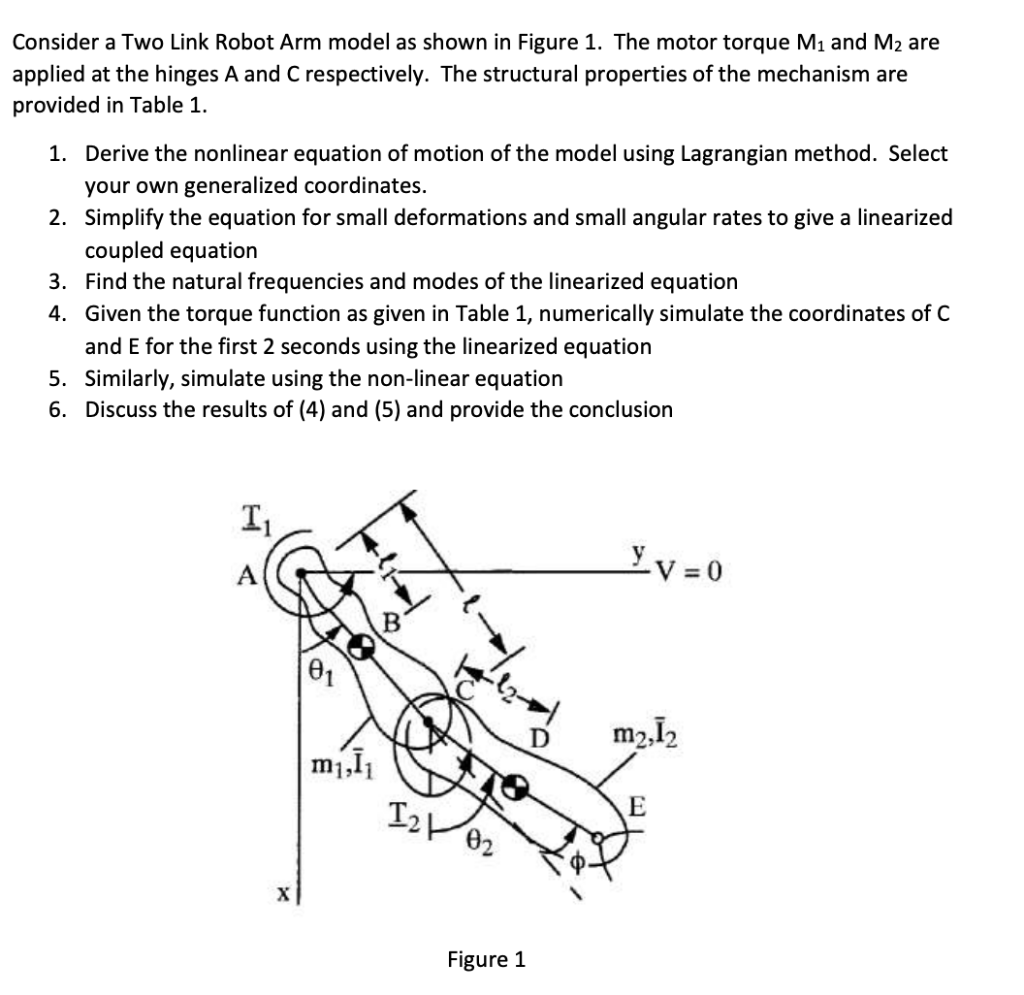
Consider a Two Link Robot Arm model as shown in Figure 1. The motor torque M1 and M2 are applied at the hinges A and C respectively. The structural properties of the mechanism are provided in Table 1. 1. Derive the nonlinear equation of motion of the model using Lagrangian method. Select your own generalized coordinates. 2. Simplify the equation for small deformations and small angular rates to give a linearized coupled equation 3. Find the natural frequencies and modes of the linearized equation 4. Given the torque function as given in Table 1, numerically simulate the coordinates of C and E for the first 2 seconds using the linearized equation 5. Similarly, simulate using the non-linear equation 6. Discuss the results of (4) and (5) and provide the conclusion 1 Y V = 0 A le m2,12 m,I1 I 22 E Figure 1