Page 1 of 1
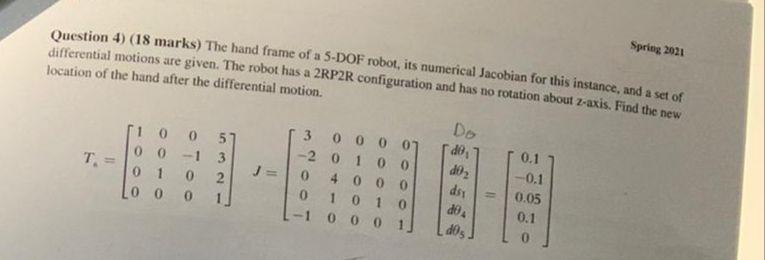
Spring 2021 Question 4) (18 marks) The hand frame of a 5-DOF robot, its numerical Jacobian for this instance, and a set
Posted: Fri Apr 29, 2022 8:35 am
by answerhappygod
- Spring 2021 Question 4 18 Marks The Hand Frame Of A 5 Dof Robot Its Numerical Jacobian For This Instance And A Set 1 (21.4 KiB) Viewed 20 times
Spring 2021 Question 4) (18 marks) The hand frame of a 5-DOF robot, its numerical Jacobian for this instance, and a set of differential motions are given. The robot has a 2RP2R configuration and has no rotation about z-axis. Find the new location of the hand after the differential motion. Do 3 0 0 0 0 dB, 0.1 10 - 2 0 0 0 do, -0.1 0 0 - 1 T. 0 ds 0.05 0 1 0 de 0.1 0 0 dos Too ال نو دا 2 0 4 0 0 1 1 0 0 0 0