Page 1 of 1
2. For the simple pendulum shown in the figure, the nonlinear equations of motion are given by where g is gravity, L is
Posted: Wed Apr 27, 2022 7:46 pm
by answerhappygod
- 2 For The Simple Pendulum Shown In The Figure The Nonlinear Equations Of Motion Are Given By Where G Is Gravity L Is 1 (33.93 KiB) Viewed 16 times
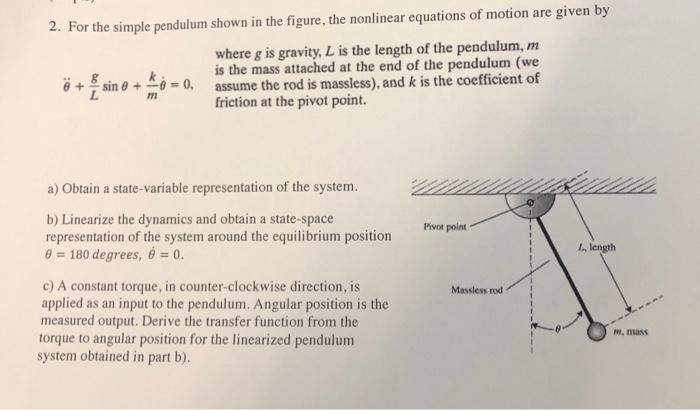
2. For the simple pendulum shown in the figure, the nonlinear equations of motion are given by where g is gravity, L is the length of the pendulum, m is the mass attached at the end of the pendulum (we = 0, assume the rod is massless), and k is the coefficient of friction at the pivot point. ö + sin 771 Pivot point length a) Obtain a state-variable representation of the system. b) Linearize the dynamics and obtain a state-space representation of the system around the equilibrium position 0 = 180 degrees, é = 0. C) A constant torque, in counter-clockwise direction, is applied as an input to the pendulum. Angular position is the measured output. Derive the transfer function from the torque to angular position for the linearized pendulum system obtained in part b). Massless rod m,