Page 1 of 1
Q4. Answer one question The motion of a vehicle steering system can be approximated by a normalised linear model written
Posted: Wed Apr 27, 2022 5:55 pm
by answerhappygod
- Q4 Answer One Question The Motion Of A Vehicle Steering System Can Be Approximated By A Normalised Linear Model Written 1 (61.43 KiB) Viewed 28 times
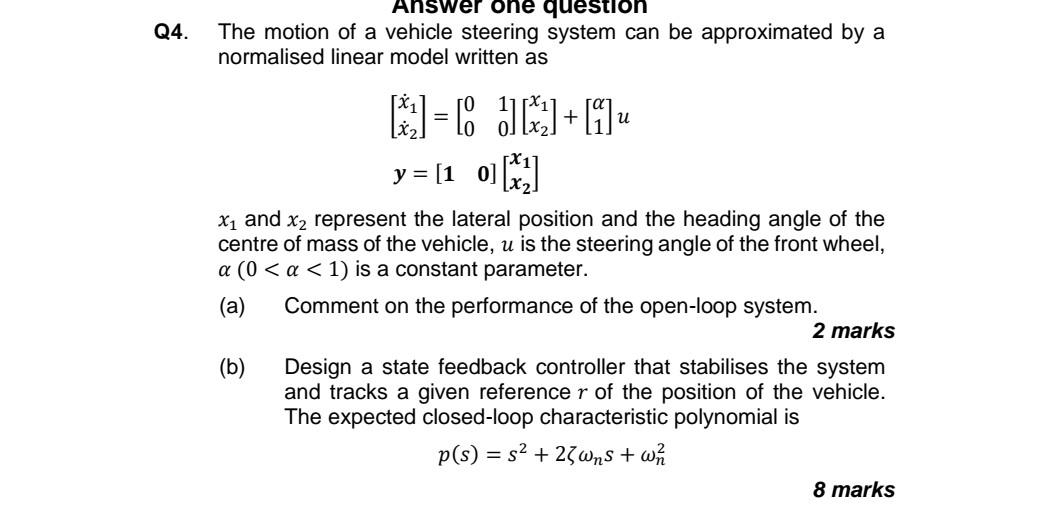
Q4. Answer one question The motion of a vehicle steering system can be approximated by a normalised linear model written as = น [*] =D ]+[1] y=[10][*3] X1 and x2 represent the lateral position and the heading angle of the centre of mass of the vehicle, u is the steering angle of the front wheel, a (0 < a < 1) is a constant parameter. (a) Comment on the performance of the open-loop system. 2 marks (b) Design a state feedback controller that stabilises the system and tracks a given referencer of the position of the vehicle. The expected closed-loop characteristic polynomial is p(s) = s2 + 23wns + wñ 8 marks