Page 1 of 1
F(t)=kpθ(t)+kr∫0tθ(t′)dt′+kDθ(t) where kP,kI, and kD are the gain factors for the proportional, integral and derl
Posted: Thu Jul 14, 2022 2:51 pm
by answerhappygod
- 1 (356.22 KiB) Viewed 32 times
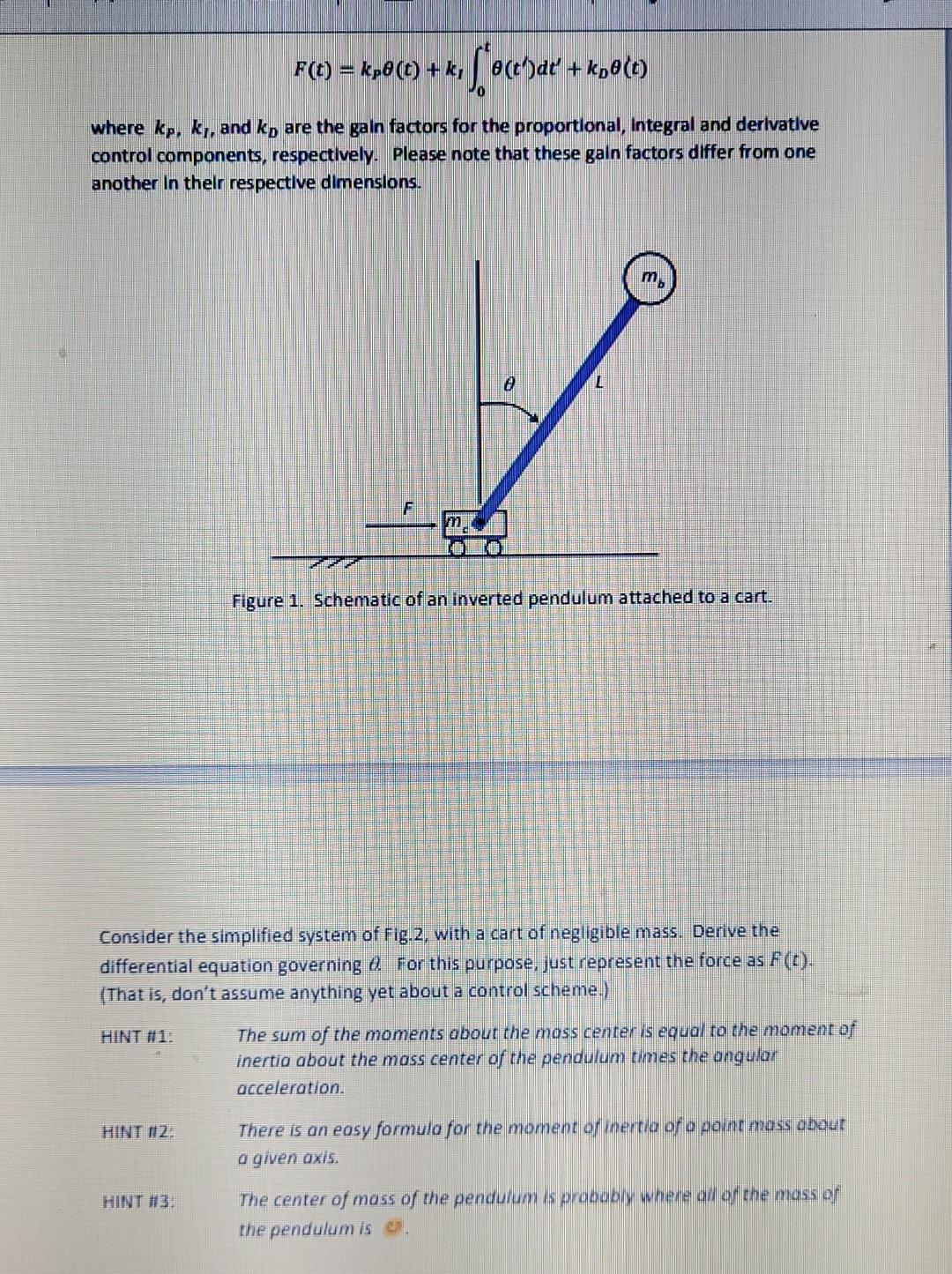
F(t)=kpθ(t)+kr∫0tθ(t′)dt′+kDθ(t) where kP,kI, and kD are the gain factors for the proportional, integral and derlvatlve control components, respectively. Please note that these gain factors differ from one another in their respective dimensions. Figure 1. Schematic of an inverted pendulum attached to a cart. Consider the simplified system of Fig.2, with a cart of negligible mass. Derive the differential equation governing θ. For this purpose, just represent the force as F(t). (That is, don't assume anything yet about a control scheme.) HINT H1: The sum of the moments about the moss center is equal to the moment of inertia about the mass center of the pendulum times the angular acceleration. HINT II2. There is an easy formula for the moment of inertia of a point mass obout: a given axis. HINT #3. The center of mass of the pendulum is probab. y whene ati of the mass of the pendulum is c?.