Page 1 of 1
24 points 1. Task The robot shown below is used for screwdriving work. The angular position of the screwdrivine tool is
Posted: Thu Jul 14, 2022 2:47 pm
by answerhappygod
- 24 Points 1 Task The Robot Shown Below Is Used For Screwdriving Work The Angular Position Of The Screwdrivine Tool Is 1 (103.06 KiB) Viewed 18 times
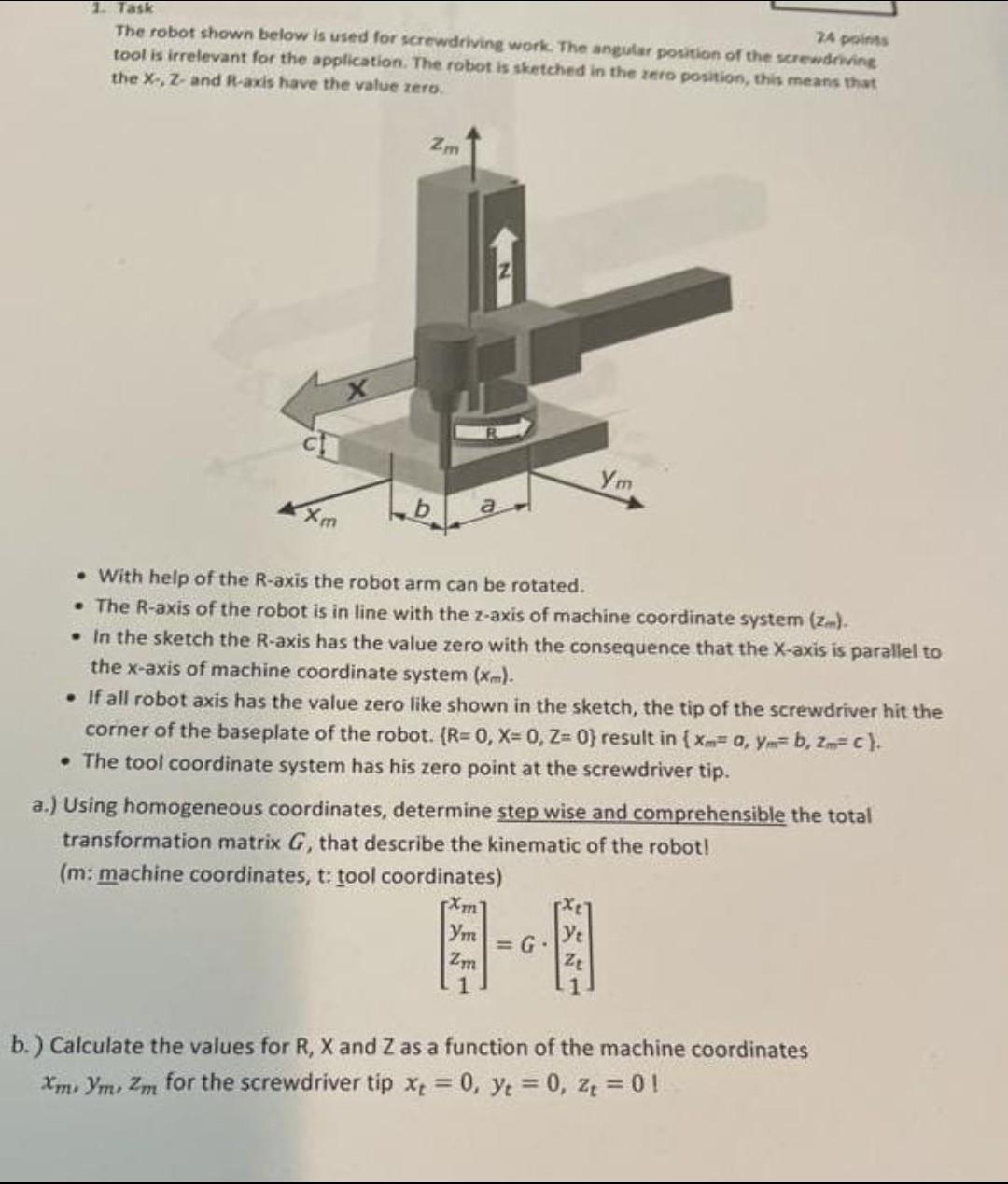
24 points 1. Task The robot shown below is used for screwdriving work. The angular position of the screwdrivine tool is irrelevant for the application. The robot is sketched in the zero position, this means that the X. 7 - and R-axis have the value rero. - With help of the R-axis the robot arm can be rotated. - The R-axis of the robot is in line with the z-axis of machine coordinate system (zm). - In the sketch the R-axis has the value zero with the consequence that the X-axis is parallel to the x-axis of machine coordinate system (xm). - If all robot axis has the value zero like shown in the sketch, the tip of the screwdriver hit the corner of the baseplate of the robot. {R=0,X=0,z=0} result in {xm=a,ym=b,zm=c}. - The tool coordinate system has his zero point at the screwdriver tip. a.) Using homogeneous coordinates, determine step wise and comprehensible the total transformation matrix G, that describe the kinematic of the robot! ( m : machine coordinates, t: tool coordinates) ⎣⎡xmymzm1⎦⎤=G⋅⎣⎡xtytzt1⎦⎤ 9.) Calculate the values for R,X and Z as a function of the machine coordinates xm,ym,zm for the screwdriver tip xt=0,yt=0,zt=01