Page 1 of 1
ithustasion od the system of interest is shown in Fig. 1. A thin rod, havieg a length d and feglelele mass in pinned 10
Posted: Thu Jul 14, 2022 2:44 pm
by answerhappygod
- Ithustasion Od The System Of Interest Is Shown In Fig 1 A Thin Rod Havieg A Length D And Feglelele Mass In Pinned 10 1 (30.17 KiB) Viewed 48 times
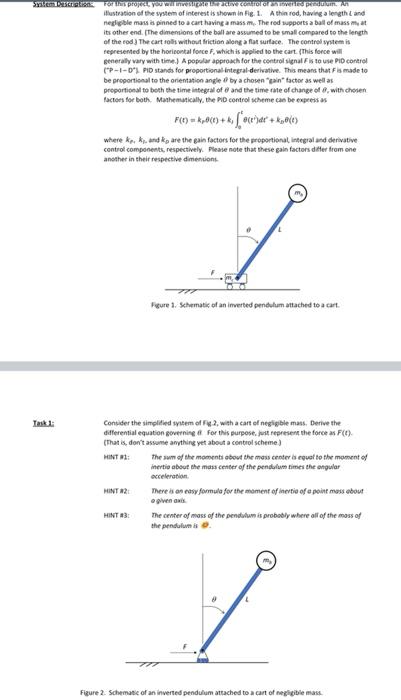
ithustasion od the system of interest is shown in Fig. 1. A thin rod, havieg a length d and feglelele mass in pinned 10 a cart having a mass m. The red woports a ball of mass m. at its other end. The dimemions of the ball are assured to be small compared to the leneth of the ead 3 The cart follt withen triction aleng a flat surface. The comrel whtem is eesresented by the hoeicontal foece F, which is applied to the cart. (This force will generally vary with time.) A popolar approakh for the control signal f is 79 wse PiD conarel (+P−1−02). FiD stands for proportional integral-derivative. This means that f a made to be proportional to the onientation angle 4 by a chosen "gain" factor as well as factoes for both. Mashemutically, the ho control wheme can be express as F(t)=kpθ(t)+k1∫etθ(t′)dr2+kBθ(t) where kp1kp and kp are the gain factors for the proportional integral and derivative control components, respectively. Please note that these gain facters defer from one ansther in their respective dimesiont. f gure 1. Shematic of an imerted pendolum antached to a cart. Consider the simplided whtem of Fig ? with a cart of negigible mass. Derive the duferential equation governice an for tis purpose. Jwit represenn the force as F(t). (That is, don't assome ampthing yet about a centrol scheme) Mist a1: the sum of the momenti abost the mass center a roust to the moment of inertig about the mass center of the pendulum fimes the angular occeleration. Misit a2t. There as as eavy formula for the moment of inevis of a point mas obout a given aais. HiNT a3: The center of mass of the pendilun is probsbly where alf of the mass of the pendulun if 0 . Fizure 2. Schematic of an inverted pendulum ateached to a cart of neglible masc.