Page 1 of 1
CONTROLLERS DESIGN AND MODIFIED Z TRANSFORM 1. A double tank system has a continuous transfer function model: G(S) 1 -3.
Posted: Tue Apr 26, 2022 4:51 pm
by answerhappygod
- Controllers Design And Modified Z Transform 1 A Double Tank System Has A Continuous Transfer Function Model G S 1 3 1 (521.9 KiB) Viewed 23 times
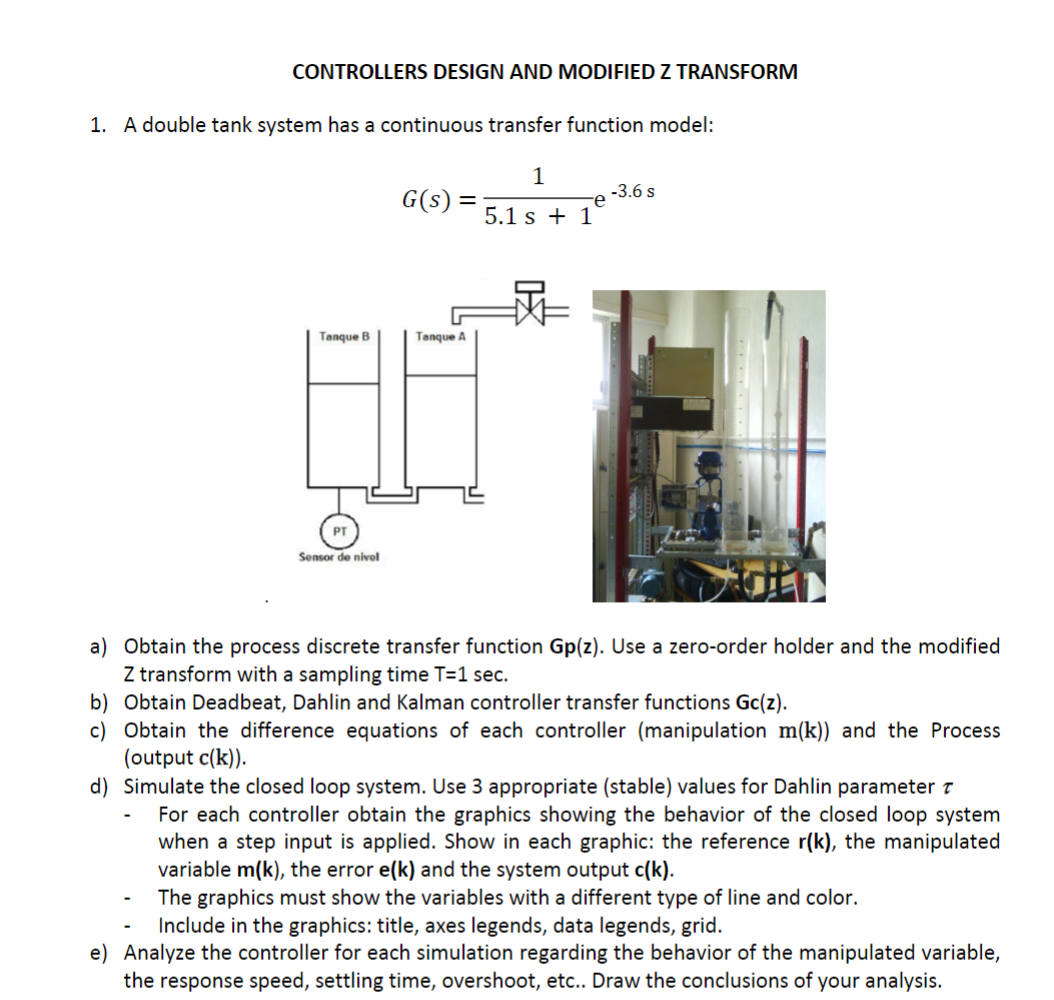
CONTROLLERS DESIGN AND MODIFIED Z TRANSFORM 1. A double tank system has a continuous transfer function model: G(S) 1 -3.6 s ге 5.1 s + 1 Tanque B Tanque A Sensor de nivel a) Obtain the process discrete transfer function Gp(z). Use a zero-order holder and the modified Z transform with a sampling time T=1 sec. b) Obtain Deadbeat, Dahlin and Kalman controller transfer functions Gc(z). c) Obtain the difference equations of each controller (manipulation m(k)) and the Process (output c(k)) d) Simulate the closed loop system. Use 3 appropriate (stable) values for Dahlin parameter t For each controller obtain the graphics showing the behavior of the closed loop system when a step input is applied. Show in each graphic: the reference r(k), the manipulated variable m(k), the error e(k) and the system output c(k). The graphics must show the variables with a different type of line and color. Include in the graphics: title, axes legends, data legends, grid. e) Analyze the controller for each simulation regarding the behavior of the manipulated variable, the response speed, settling time, overshoot, etc.. Draw the conclusions of your analysis.