Page 1 of 1
The Jacobian of a certain 2 link planar robot is given below as °J(0) = = - L1 S1 - L2 S12 -L2 S12 L1 C1 + L2 C12 L2 C12
Posted: Tue Apr 26, 2022 3:31 pm
by answerhappygod
- The Jacobian Of A Certain 2 Link Planar Robot Is Given Below As J 0 L1 S1 L2 S12 L2 S12 L1 C1 L2 C12 L2 C12 1 (83.61 KiB) Viewed 35 times
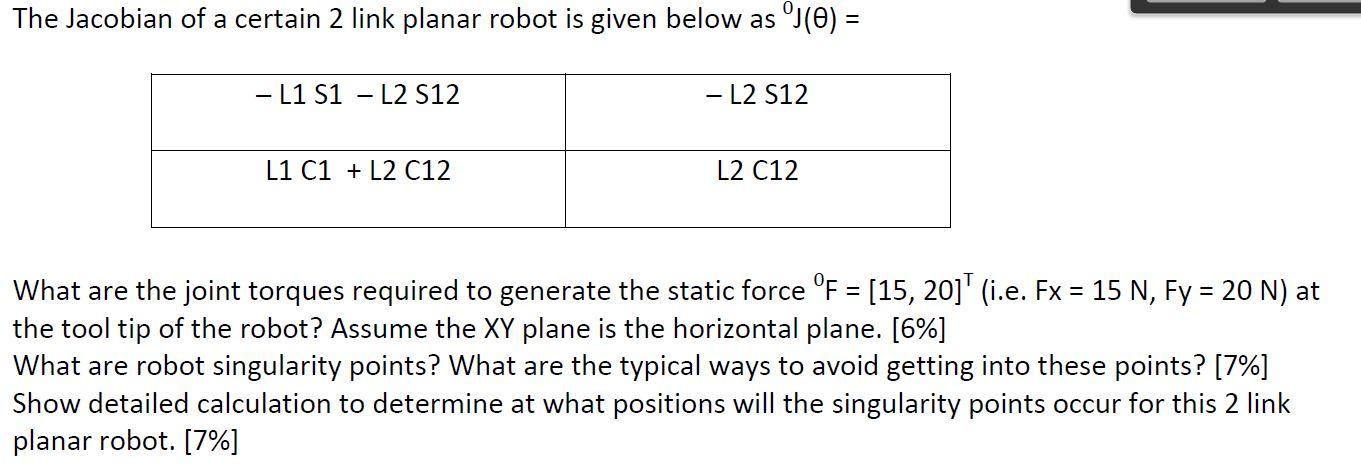
The Jacobian of a certain 2 link planar robot is given below as °J(0) = = - L1 S1 - L2 S12 -L2 S12 L1 C1 + L2 C12 L2 C12 What are the joint torques required to generate the static force °F = [15, 20]" (i.e. Fx = 15 N, Fy = 20 N) at the tool tip of the robot? Assume the XY plane is the horizontal plane. [6%] What are robot singularity points? What are the typical ways to avoid getting into these points? [7%] Show detailed calculation to determine at what positions will the singularity points occur for this 2 link planar robot. [7%]