Page 1 of 1
5.25 You wish to position a cart on a length of track. The cart is to move to one position on the track to be filled and
Posted: Tue Apr 26, 2022 3:22 pm
by answerhappygod
- 5 25 You Wish To Position A Cart On A Length Of Track The Cart Is To Move To One Position On The Track To Be Filled And 1 (117.59 KiB) Viewed 31 times
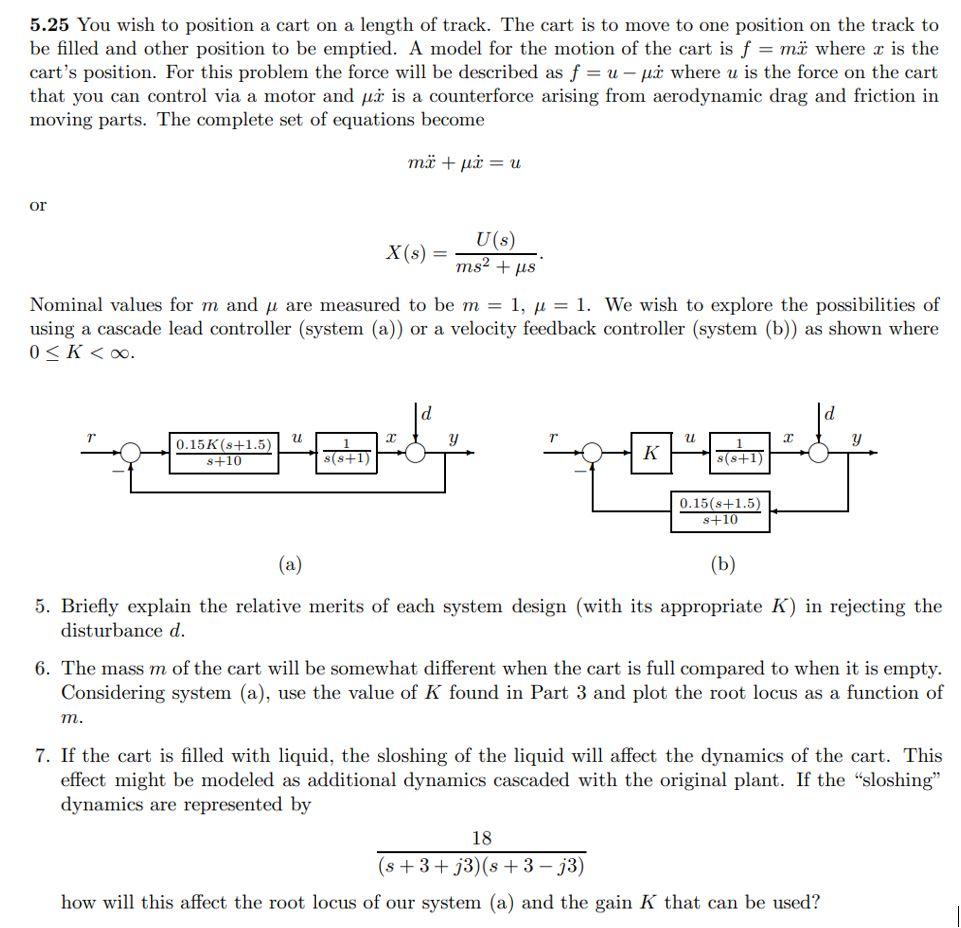
5.25 You wish to position a cart on a length of track. The cart is to move to one position on the track to be filled and other position to be emptied. A model for the motion of the cart is f = më where x is the cart's position. For this problem the force will be described as f = u-ui where u is the force on the cart that you can control via a motor and pi is a counterforce arising from aerodynamic drag and friction in moving parts. The complete set of equations become mi + i = u от X(S) = ms? + us Nominal values for m and p are measured to be m = 1, y = 1. We wish to explore the possibilities of using a cascade lead controller (system (a)) or a velocity feedback controller (system (b)) as shown where 0<K<. U 1 y U 2 y 0.15K (8+1.5) s+10 s(s+1) K s(s+1) 0.15(8+1.5) 8+10 (a) (b) 5. Briefly explain the relative merits of each system design (with its appropriate K) in rejecting the disturbance d. 6. The mass m of the cart will be somewhat different when the cart is full compared to when it is empty. Considering system (a), use the value of K found in Part 3 and plot the root locus as a function of m. 7. If the cart is filled with liquid, the sloshing of the liquid will affect the dynamics of the cart. This effect might be modeled as additional dynamics cascaded with the original plant. If the "sloshing" dynamics are represented by 18 (s +3+ j3)(s +3-j3) how will this affect the root locus of our system (a) and the gain K that can be used?