Page 1 of 1
Figure Qla shows a Linear Time Invariant (LTI) digital filtering network where hi[n]=[1.5 3 1.25), h2[n]=[ 0.5 3 0.25) a
Posted: Tue Apr 26, 2022 2:59 pm
by answerhappygod
- Figure Qla Shows A Linear Time Invariant Lti Digital Filtering Network Where Hi N 1 5 3 1 25 H2 N 0 5 3 0 25 A 1 (88.12 KiB) Viewed 39 times
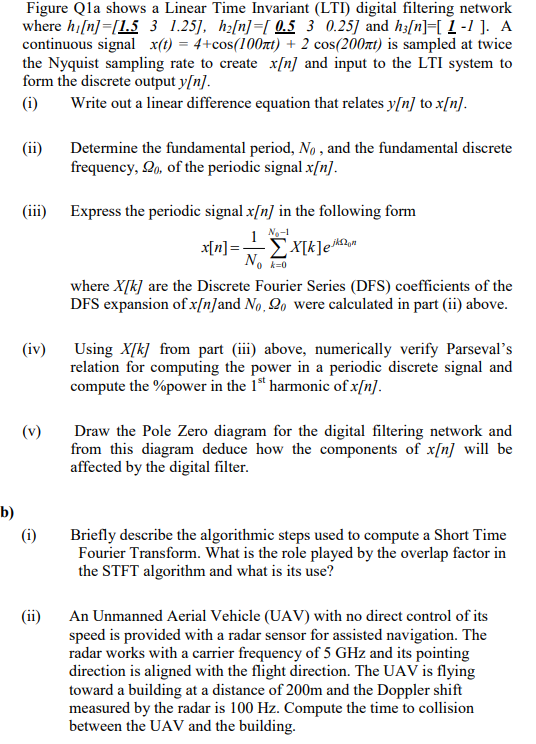
Figure Qla shows a Linear Time Invariant (LTI) digital filtering network where hi[n]=[1.5 3 1.25), h2[n]=[ 0.5 3 0.25) and h3[n][ 1-1]. A continuous signal x(t) = 4+cos(100nt) + 2 cos(200rt) is sampled at twice the Nyquist sampling rate to create x[n] and input to the LTI system to form the discrete output y[n]. (i) Write out a linear difference equation that relates y[n) to x[n]. (ii) Determine the fundamental period, No, and the fundamental discrete frequency, 20, of the periodic signal x[n]. N-1 (iii) Express the periodic signal x[n] in the following form 1 x[n]= 1 [k] N where X[k] are the Discrete Fourier Series (DFS) coefficients of the DFS expansion of x[n]and No 9, were calculated in part (ii) above. -ΣΧ[K]eΩ 0 k=0 (iv) Using X[k] from part (iii) above, numerically verify Parseval's relation for computing the power in a periodic discrete signal and compute the power in the 1* harmonic of x[n]. (v) Draw the Pole Zero diagram for the digital filtering network and from this diagram deduce how the components of x[n] will be affected by the digital filter. b) Briefly describe the algorithmic steps used to compute a Short Time Fourier Transform. What is the role played by the overlap factor in the STFT algorithm and what is its use? (ii) An Unmanned Aerial Vehicle (UAV) with no direct control of its speed is provided with a radar sensor for assisted navigation. The radar works with a carrier frequency of 5 GHz and its pointing direction is aligned with the flight direction. The UAV is flying toward a building at a distance of 200m and the Doppler shift measured by the radar is 100 Hz. Compute the time to collision between the UAV and the building.
h[n] y[n] x[n] h3[n] 0 - h2[n] Figure Qla