Page 1 of 1
A system is given by a series connection of two subsystems. The input of the second subsystem is given by the output y₁
Posted: Sun Jul 10, 2022 11:26 am
by answerhappygod
- A System Is Given By A Series Connection Of Two Subsystems The Input Of The Second Subsystem Is Given By The Output Y 1 (34.06 KiB) Viewed 55 times
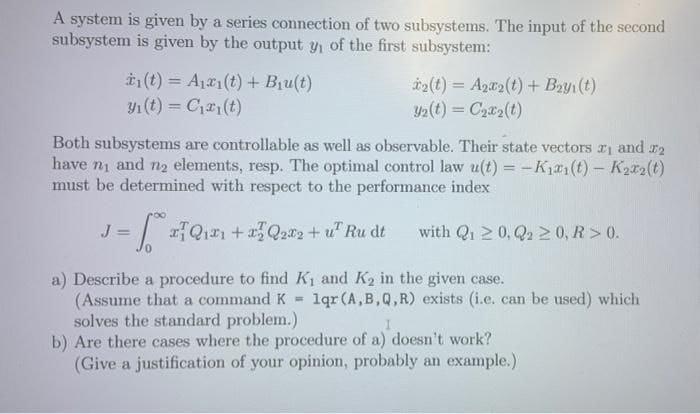
A system is given by a series connection of two subsystems. The input of the second subsystem is given by the output y₁ of the first subsystem: ₁ (t) = A₁₁(t) + B₁u(t) y₁ (t) = C₁₁(t) ₂(t) = A₂2(t) + B2y(t) Y₂(t) = C₂x2(t) Both subsystems are controllable as well as observable. Their state vectors 21 and 2₂ have n₁ and n₂ elements, resp. The optimal control law u(t) = -Kiai(t)- K₂x2(t) must be determined with respect to the performance index J = x² + x² Q2*2 + ² Rudt with Q₁ ≥ 0, Q2 ≥ 0, R > 0. a) Describe a procedure to find K₁ and K₂ in the given case. = (Assume that a command K 1qr (A,B,Q,R) exists (i.e. can be used) which solves the standard problem.) b) Are there cases where the procedure of a) doesn't work? (Give a justification of your opinion, probably an example.).