- This Exercise Should Be Run In Matlab 2019 Or Later Versions It Makes Use Of The Matlab Control Toolbox Create A Folde 1 (71.89 KiB) Viewed 35 times
- This Exercise Should Be Run In Matlab 2019 Or Later Versions It Makes Use Of The Matlab Control Toolbox Create A Folde 2 (46.28 KiB) Viewed 35 times
This exercise should be run in MATLAB 2019 or later versions. It makes use of the MATLAB Control Toolbox. Create a folder located in your Desktop named CLA50124. Introduction The procedure for designing industrial control systems can be broken down into the following stages: i) Study system to be controlled - choose sensors and actuators ii) Model resulting system to be controlled Linearize model. Simplify model if necessary Analyze the resulting model, determine its properties Decide on performance specifications, decide on type of controller to be used Design controller to meet specifications Test controllers by simulation with full non-linear model of the plant Design hardware and software and implement controller Tune controller on-line if necessary iv) v) vi) vii) viii) ix) x) The objective of the laboratory exercise is to use various techniques to analyse and design feedback controllers for a simple system, that is to perform stages (iv) and (vi) of the above procedure. You will design controllers for a simple plant modelled as a 3rd order system, G(s), of the form k s(T,s + 1)(T.s + 1) G(s)-- The objective of the design is to obtain a feedback controller which achieves the performance specifications on the step response of Mp ≤ 12% and tp ≤ 0.6 sec, with zero steady state error. After system modelling and linearization, the next stage in the control system design procedure is to perform some analysis of the plant. In this exercise, the analysis consists of looking at the open loop poles and zeros, the open loop step response, the plant Bode plot and root locus. By means of the Bode plot, some stability analysis on the system is also be performed to find out limiting values of controller gain. For the controller design stage of this exercise, proportional controllers are designed using Bode plots. In addition, a P+D controller is designed.
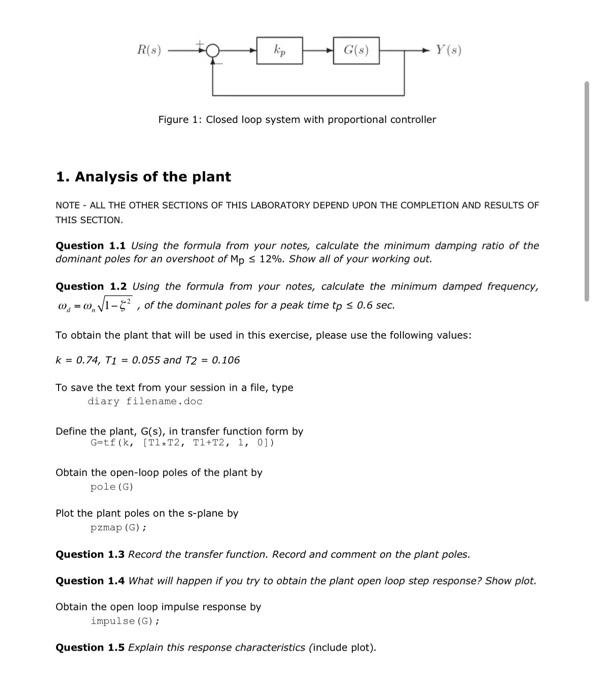
R(s) kp Figure 1: Closed loop system with proportional controller 1. Analysis of the plant NOTE - ALL THE OTHER SECTIONS OF THIS LABORATORY DEPEND UPON THE COMPLETION AND RESULTS OF THIS SECTION. G(s)
Question 1.1 Using the formula from your notes, calculate the minimum damping ratio of the dominant poles for an overshoot of Mp ≤ 12%. Show all of your working out. Y(8)
Question 1.2 Using the formula from your notes, calculate the minimum damped frequency, 0-01-², of the dominant poles for a peak time tp ≤ 0.6 sec. To save the text from your session in a file, type diary filename.doc To obtain the plant that will be used in this exercise, please use the following values: k = 0.74, T1 = 0.055 and T2 = 0.106 Define the plant, G(s), in transfer function form by G-tf (k, [T1.T2, T1+T2, 1, 01) Obtain the open-loop poles of the plant by pole (G) Plot the plant poles on the s-plane by pzmap (G);
Question 1.3 Record the transfer function. Record and comment on the plant poles.
Question 1.4 What will happen if you try to obtain the plant open loop step response? Show plot. Obtain the open loop impulse response by impulse (G);
Question 1.5 Explain this response characteristics (include plot).