Page 1 of 1
10.62) Figure P10.62 shows PD control applied to an unstable plant. The gains have 0.707 and the time constant is been c
Posted: Fri Jul 08, 2022 5:41 am
by answerhappygod
- 10 62 Figure P10 62 Shows Pd Control Applied To An Unstable Plant The Gains Have 0 707 And The Time Constant Is Been C 1 (48.91 KiB) Viewed 27 times
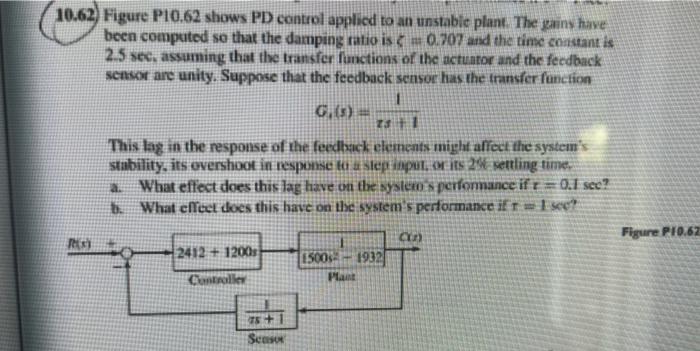
10.62) Figure P10.62 shows PD control applied to an unstable plant. The gains have 0.707 and the time constant is been computed so that the damping ratio is 2.5 sec, assuming that the transfer functions of the actuator and the feedback sensor are unity. Suppose that the feedback sensor has the transfer function 1 zs + 1 Risi This lag in the response of the feedback elements might affect the system's stability, its overshoot in response to a step input, or its 2% settling time. a. What effect does this lag have on the system's performance if t 0.1 see? What effect does this have on the system's performance if tw I see? b. 2412+1200s Controller G, (s) = 75+1 Seaso 1500 1932 Plant Con Figure P10.62