Page 1 of 1
We want to control the first-order system G(s) = using an integrating controller F(s) = . e(t) Vref (t) |G(iw)| arg G(iw
Posted: Fri Jul 01, 2022 6:10 am
by answerhappygod
- We Want To Control The First Order System G S Using An Integrating Controller F S E T Vref T G Iw Arg G Iw 1 (66.01 KiB) Viewed 21 times
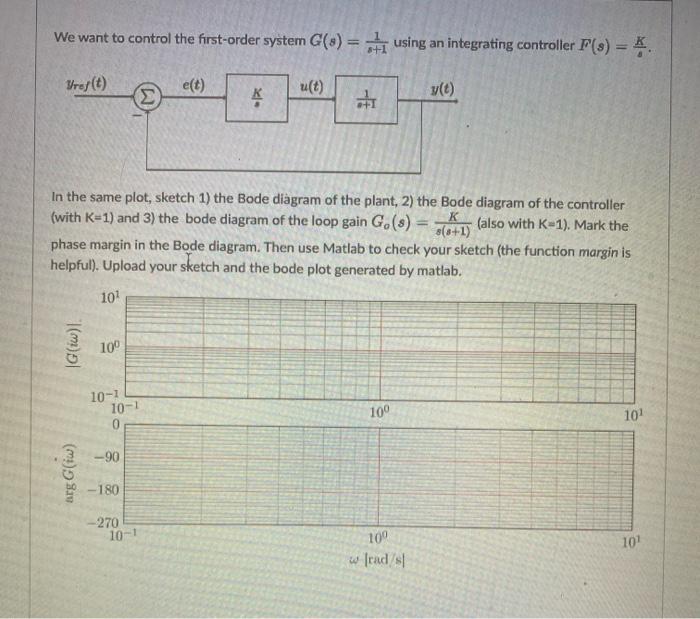
We want to control the first-order system G(s) = using an integrating controller F(s) = . e(t) Vref (t) |G(iw)| arg G(iw) 10⁰ 10-1 10-1 0 -90 Σ K In the same plot, sketch 1) the Bode diagram of the plant, 2) the Bode diagram of the controller (with K-1) and 3) the bode diagram of the loop gain Go (s): (also with K-1). Mark the 8(6+1) phase margin in the Bode diagram. Then use Matlab to check your sketch (the function margin is helpful). Upload your sketch and the bode plot generated by matlab. 10¹ -180 -270 10-1 KI ķ u(t) # 10⁰ y(t) 100 w [rad/s 10¹ 10¹