Page 1 of 1
1. Consider the closed-loop system with measurement noise N(s), where + R(.s) Ge(s) H(s) G(s) 1 + + N(s) K₂ Y(s) Gc(s) =
Posted: Fri Jul 01, 2022 6:01 am
by answerhappygod
- 1 Consider The Closed Loop System With Measurement Noise N S Where R S Ge S H S G S 1 N S K Y S Gc S 1 (60.31 KiB) Viewed 34 times
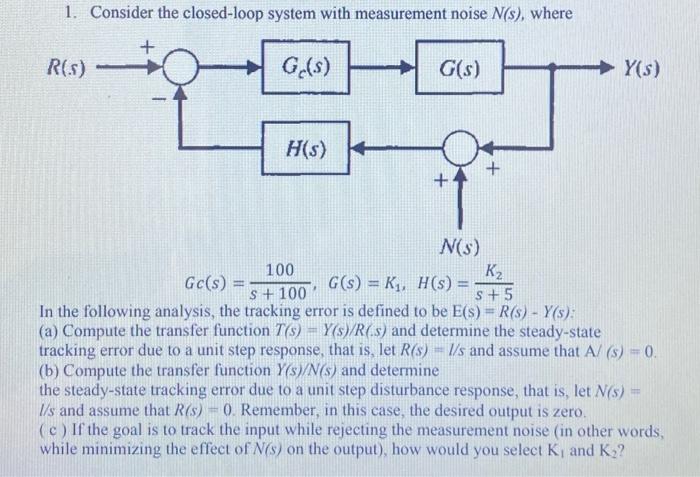
1. Consider the closed-loop system with measurement noise N(s), where + R(.s) Ge(s) H(s) G(s) 1 + + N(s) K₂ Y(s) Gc(s) = 100 s+100 G(s) K₁, H(s) = S+5 In the following analysis, the tracking error is defined to be E(s) = R(s) - Y(s): (a) Compute the transfer function T(s) = Y(s)/R(s) and determine the steady-state tracking error due to a unit step response, that is, let R(s) = 1/s and assume that A/ (s) - 0. (b) Compute the transfer function Y(s)/N(s) and determine the steady-state tracking error due to a unit step disturbance response, that is, let N(s) = I/s and assume that R(s) - 0. Remember, in this case, the desired output is zero. (c) If the goal is to track the input while rejecting the measurement noise (in other words, while minimizing the effect of N(s) on the output), how would you select K, and K₂?