Page 1 of 1
ROBOTICS 4/M TUTORIAL 4: CONTROL Q1. Derive an Inverse Dynamics Controller for the joint position for the manipulator sh
Posted: Wed Mar 30, 2022 10:05 am
by answerhappygod
- Robotics 4 M Tutorial 4 Control Q1 Derive An Inverse Dynamics Controller For The Joint Position For The Manipulator Sh 1 (50 KiB) Viewed 41 times
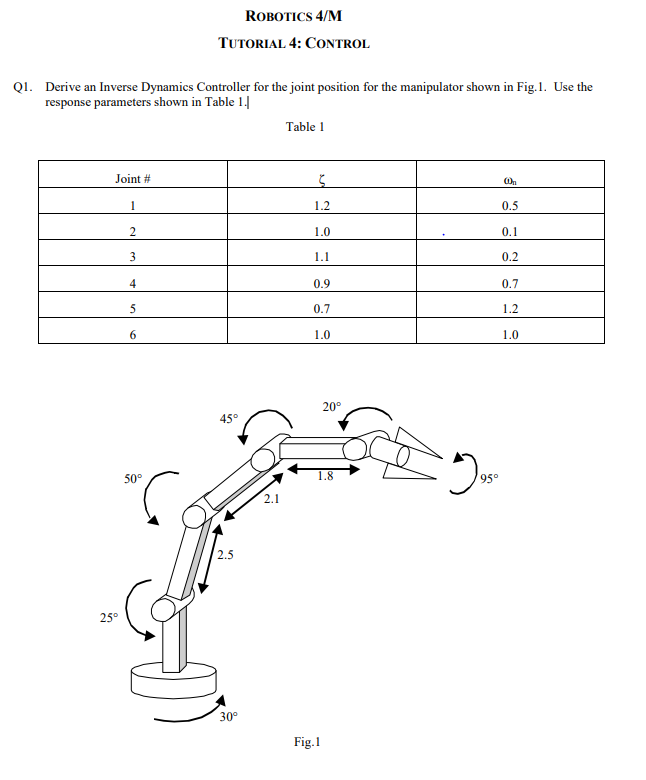
ROBOTICS 4/M TUTORIAL 4: CONTROL Q1. Derive an Inverse Dynamics Controller for the joint position for the manipulator shown in Fig.1. Use the response parameters shown in Table 1. Table 1 Joint # Š On 1 1.2 0.5 2 1.0 0.1 3 1.1 0.2 4 0.9 0.7 5 0.7 1.2 6 1.0 1.0 20° 45° 50° 1.8 ar Jos 2.1 2.5 25° 30° Fig. 1