Page 1 of 1
• Consider a rigid body with triangle shape that can only moves translationally in an infinite workspace W = R2. The con
Posted: Fri Mar 04, 2022 10:18 am
by answerhappygod
- Consider A Rigid Body With Triangle Shape That Can Only Moves Translationally In An Infinite Workspace W R2 The Con 1 (80.95 KiB) Viewed 53 times
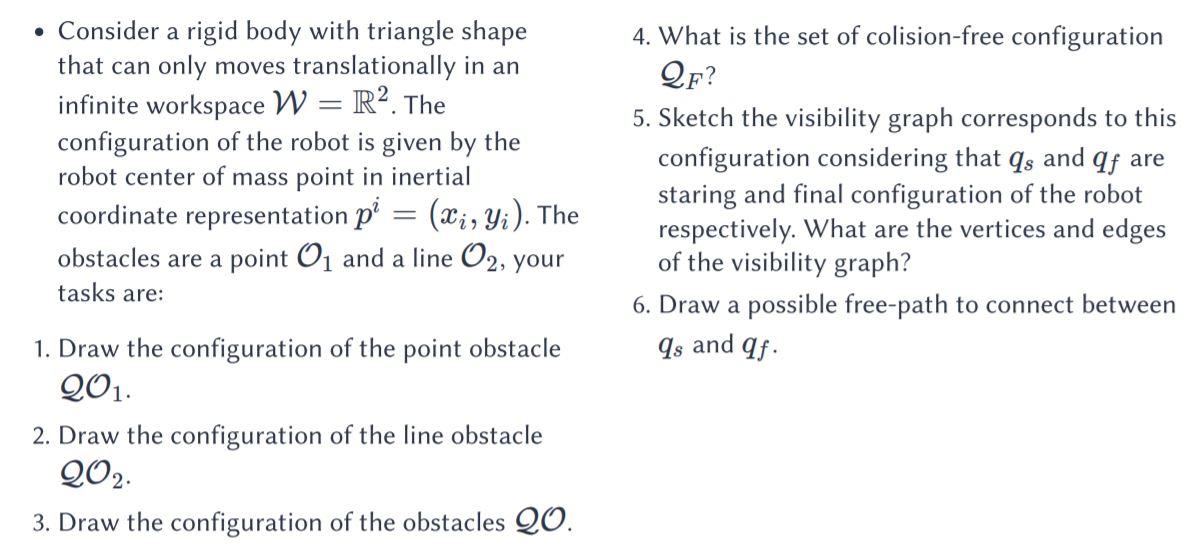
• Consider a rigid body with triangle shape that can only moves translationally in an infinite workspace W = R2. The configuration of the robot is given by the robot center of mass point in inertial coordinate representation på (di, Yi). The obstacles are a point O1 and a line O2, your tasks are: 4. What is the set of colision-free configuration QF? 5. Sketch the visibility graph corresponds to this configuration considering that qs and qf are staring and final configuration of the robot respectively. What are the vertices and edges of the visibility graph? 6. Draw a possible free-path to connect between qs and af = 1. Draw the configuration of the point obstacle Q01. 2. Draw the configuration of the line obstacle 202 3. Draw the configuration of the obstacles Q0.
as 01 . O2 VA 02 (13 0 VA (1 af Figure: A translational robot in 2D space with a point and a line obstacles in the workspace.