Page 1 of 1
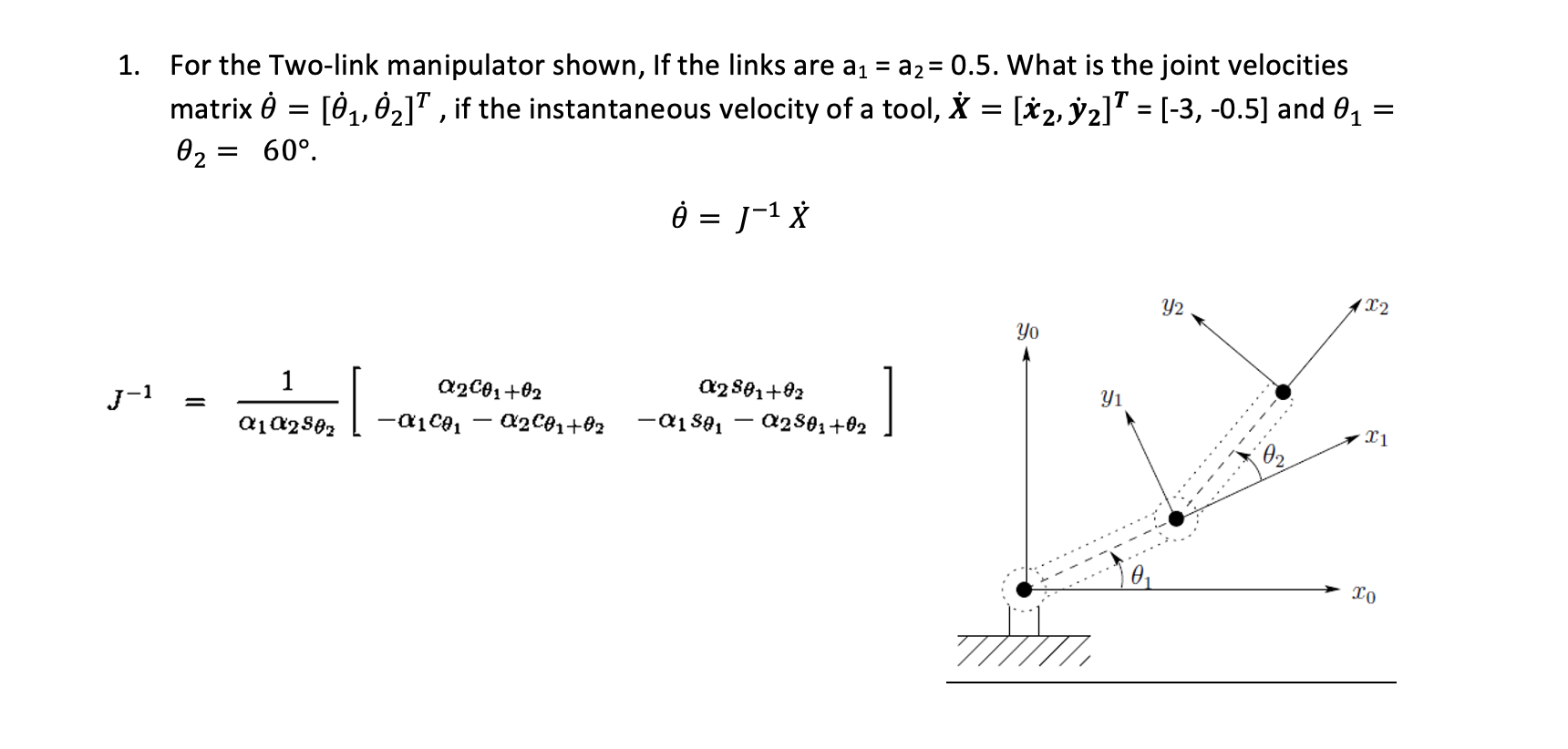
1. For the Two-link manipulator shown, If the links are a1 = a2 = 0.5. What is the joint velocities matrix ) = [04, 02]?
Posted: Fri Mar 04, 2022 10:08 am
by answerhappygod
- 1 For The Two Link Manipulator Shown If The Links Are A1 A2 0 5 What Is The Joint Velocities Matrix 04 02 1 (90.06 KiB) Viewed 53 times
1. For the Two-link manipulator shown, If the links are a1 = a2 = 0.5. What is the joint velocities matrix ) = [04, 02]? , if the instantaneous velocity of a tool, X = [<2, ý2]" = (-3, -0.5] and @1 02 - 60°. - = = h = J-1 X = Y2 AL2 Yo 1 J-1 A2C01+02 -Q1CA - Q2C01+02 ai2801+02 -a1841 - 02301 +02 Yi Q102902 ....... 21 10 То 7.