Page 1 of 1
Read Only - You can't save changes to this file. く Advanced System Theory [Problem 1]: Given the system. -2 10 TOO X(t)=
Posted: Sat Feb 26, 2022 10:57 am
by answerhappygod
- 1 (184.38 KiB) Viewed 76 times
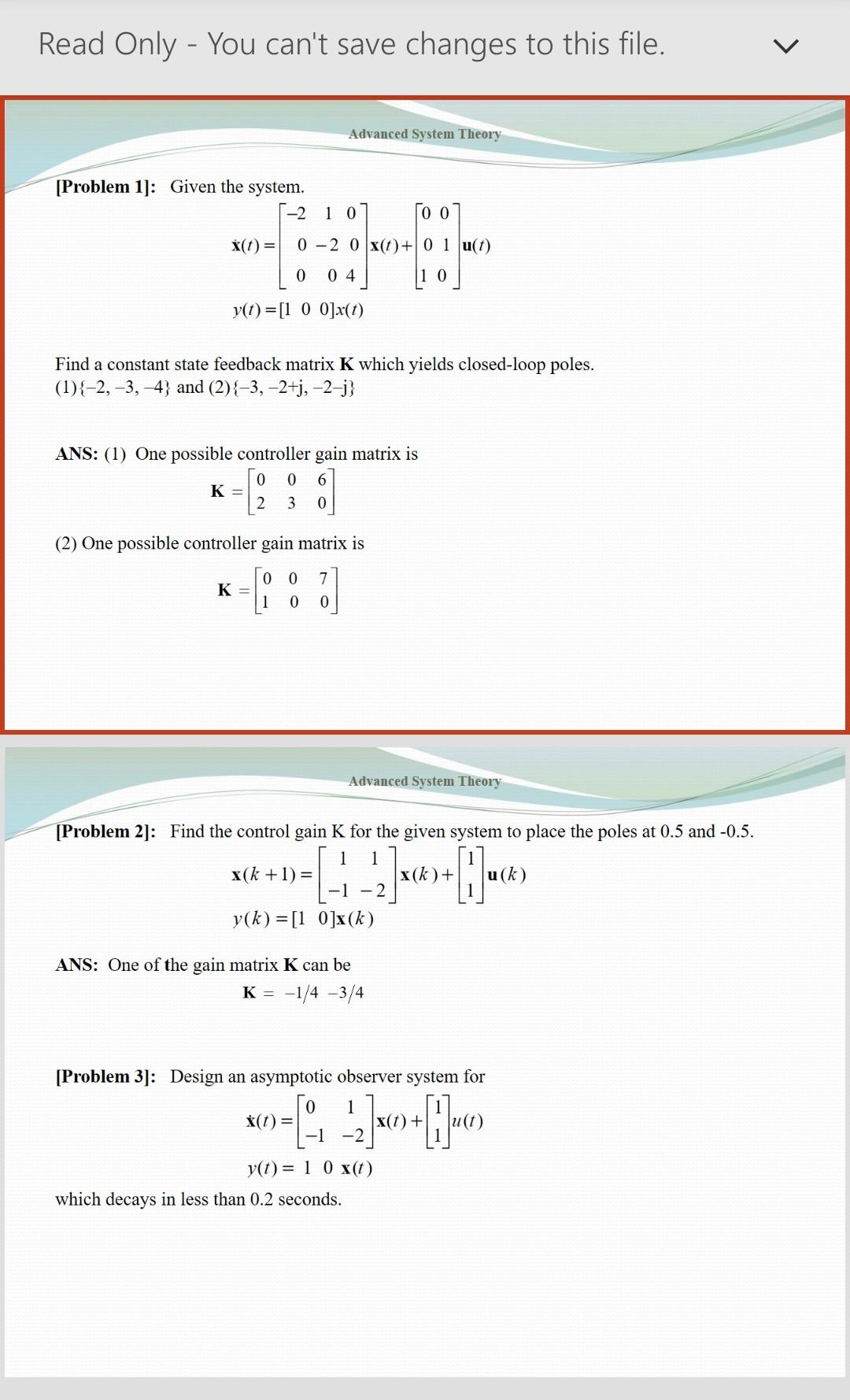
Read Only - You can't save changes to this file. く Advanced System Theory [Problem 1]: Given the system. -2 10 TOO X(t)= 0 -2 0 X(t)+ 01 (1) 0 04 1 0 y(t)=[1 0 0]x(t) Find a constant state feedback matrix K which yields closed-loop poles. (1){-2, -3, -4} and (2){-3, -2+j, -2–j} ANS: (1) One possible controller gain matrix is 0 0 6 K= 2 3 0 (2) One possible controller gain matrix is 0 0 7 K= 0 Advanced System Theory [Problem 2]: Find the control gain K for the given system to place the poles at 0.5 and -0.5. 1 1 x(k +1) = x(k) + 1(k) -1 - 2 y(k) =[10]x(k) -3)«+(1c) ANS: One of the gain matrix K can be K = -1/4-3/4 [Problem 3]: Design an asymptotic observer system for 0 1 X(t) = C -2)* + 1 -1 y(t) = 1 0 x(t) which decays in less than 0.2 seconds.