Page 1 of 1
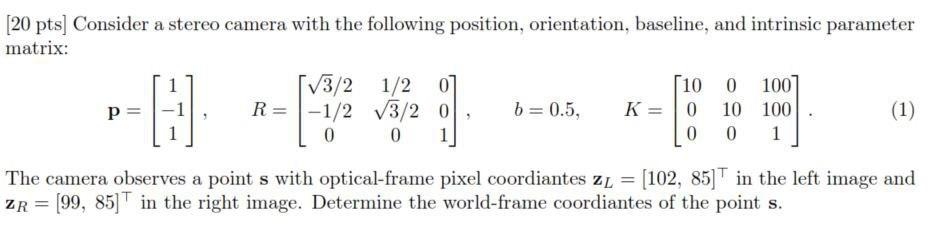
[20 pts] Consider a stereo camera with the following position, orientation, baseline, and intrinsic parameter matrix: TV
Posted: Sat Feb 19, 2022 3:25 pm
by answerhappygod
- 20 Pts Consider A Stereo Camera With The Following Position Orientation Baseline And Intrinsic Parameter Matrix Tv 1 (27.75 KiB) Viewed 71 times
[20 pts] Consider a stereo camera with the following position, orientation, baseline, and intrinsic parameter matrix: TV3/2 1/2 01 10 0 100 p = R= -1/2 3/20 b = 0.5, K= 0 10 100 (1) 0 0 1 0 0 1 H = The camera observes a point s with optical-frame pixel coordiantes zu = [102, 85]" in the left image and ZR= [99, 85]" in the right image. Determine the world-frame coordiantes of the point s.