Page 1 of 1
Given 2 DOF Robot as shown in Fig 3. All link connection are revolute joint. Calculate : a) the Kinematic equation; Xe =
Posted: Fri Jan 21, 2022 8:40 am
by answerhappygod
- Given 2 Dof Robot As Shown In Fig 3 All Link Connection Are Revolute Joint Calculate A The Kinematic Equation Xe 1 (45.05 KiB) Viewed 64 times
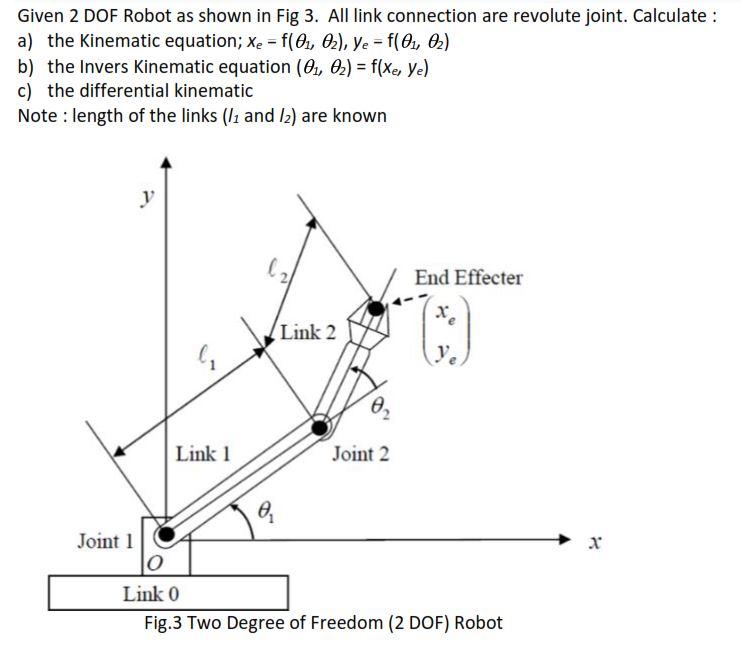
Given 2 DOF Robot as shown in Fig 3. All link connection are revolute joint. Calculate : a) the Kinematic equation; Xe = f(0, 0), Ye-f(0, 02) b) the Invers Kinematic equation (O1, O2) = f(xe, ye) c) the differential kinematic Note : length of the links (11 and 12) are known Y End Effecter Xe Link 2 G y o Link 1 Joint 2 Joint 1 x Link 0 Fig.3 Two Degree of Freedom (2 DOF) Robot