Page 1 of 1
R(S) C(s) Gc(s) (s + 0.6) (s + 0.58)(s + 0.02) Figure 1 Block diagram of hybrid electric vehicle (HEV) Figure 1 shows th
Posted: Fri Jan 21, 2022 8:39 am
by answerhappygod
- R S C S Gc S S 0 6 S 0 58 S 0 02 Figure 1 Block Diagram Of Hybrid Electric Vehicle Hev Figure 1 Shows Th 1 (69.42 KiB) Viewed 61 times
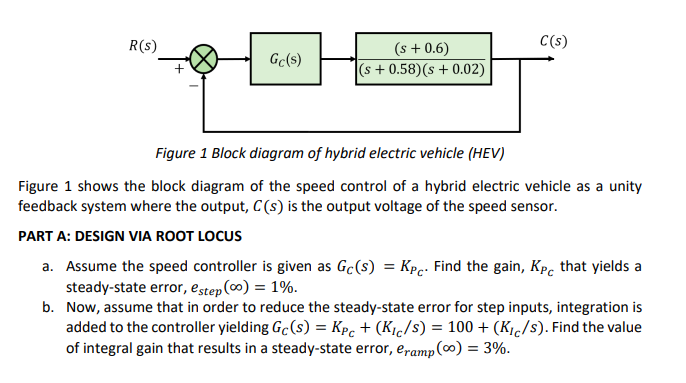
R(S) C(s) Gc(s) (s + 0.6) (s + 0.58)(s + 0.02) Figure 1 Block diagram of hybrid electric vehicle (HEV) Figure 1 shows the block diagram of the speed control of a hybrid electric vehicle as a unity feedback system where the output, C(s) is the output voltage of the speed sensor. PART A: DESIGN VIA ROOT LOCUS a. Assume the speed controller is given as Gc(s) = Kpc. Find the gain, Kpe that yields a steady-state error, estep() = 1%. b. Now, assume that in order to reduce the steady-state error for step inputs, integration is added to the controller yielding Gc(s) = Kpc + (Kıc/s) = 100 + (Kıc/s). Find the value of integral gain that results in a steady-state error, eramp (0) = 3%. =