Page 1 of 1
ENSE411 4. Consider the Hidden Markov Model (HMM) as shown in Fig. 24 X1 X₂ X3 E1 E2 E3 Fig. 24 The prior probability P(
Posted: Fri Dec 24, 2021 10:14 am
by answerhappygod
- Ense411 4 Consider The Hidden Markov Model Hmm As Shown In Fig 24 X1 X X3 E1 E2 E3 Fig 24 The Prior Probability P 1 (58.94 KiB) Viewed 132 times
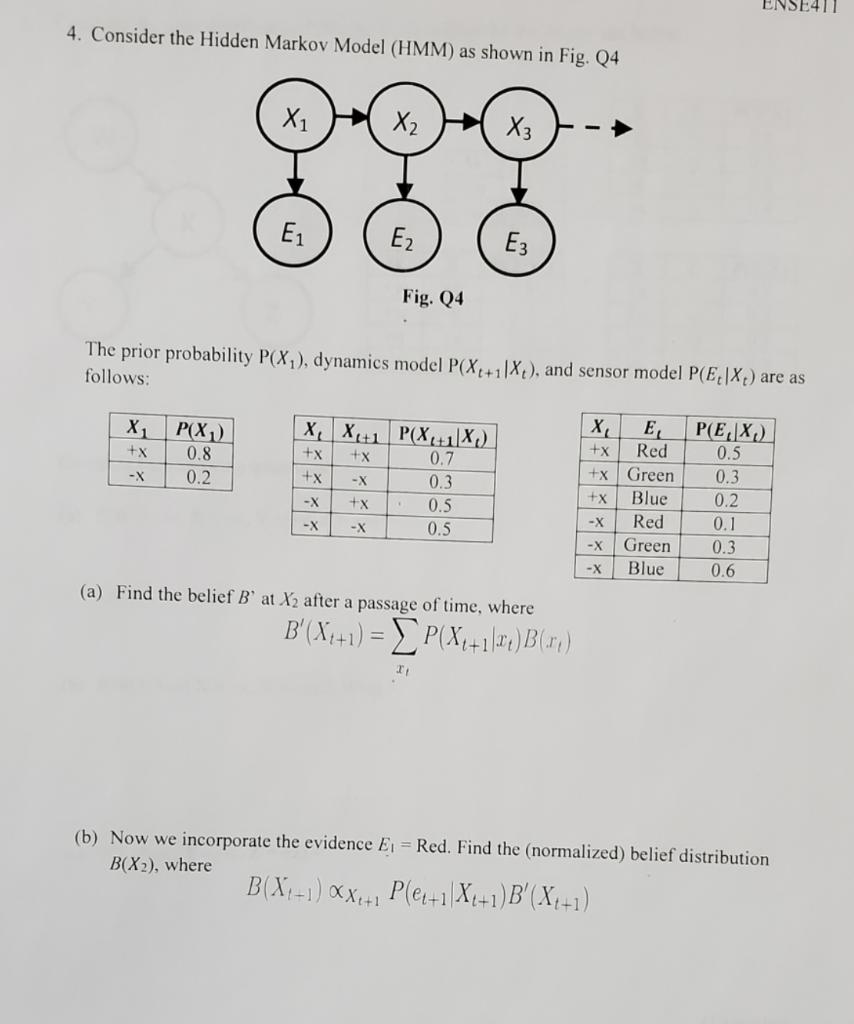
ENSE411 4. Consider the Hidden Markov Model (HMM) as shown in Fig. 24 X1 X₂ X3 E1 E2 E3 Fig. 24 The prior probability P(X), dynamics model P(Xt+1|Xt), and sensor model P(E4|X:) are as follows: X1 P(X1) X, X1+1 P(X+11X.) Х. E P(EX) +x Red 0.5 +x 0.8 +x +x 0.7 +x Green 0.3 -X 0.2 +x -X 0.3 +x Blue 0.2 -X +x 0.5 Red 0.1 -X -X 0.5 -X Green 0.3 Blue 0.6 -X -X (a) Find the belief B at X2 after a passage of time, where B'(Ni+1) = P(Xr+12) Bl.ro) I (b) Now we incorporate the evidence Ei = Red. Find the (normalized) belief distribution B(X2), where Ple+1X4+1)B' (X+1) B(X-1) XX+1