Page 1 of 1
conditions/assumptions. r N >X² X₁ b Consider frame-2 (X2, Yz, Zz) is rotating with reference to frame- 1 (X₁, Y₁, Zı) a
Posted: Wed Jun 08, 2022 11:53 am
by answerhappygod
- Conditions Assumptions R N X X B Consider Frame 2 X2 Yz Zz Is Rotating With Reference To Frame 1 X Y Zi A 1 (29.44 KiB) Viewed 42 times
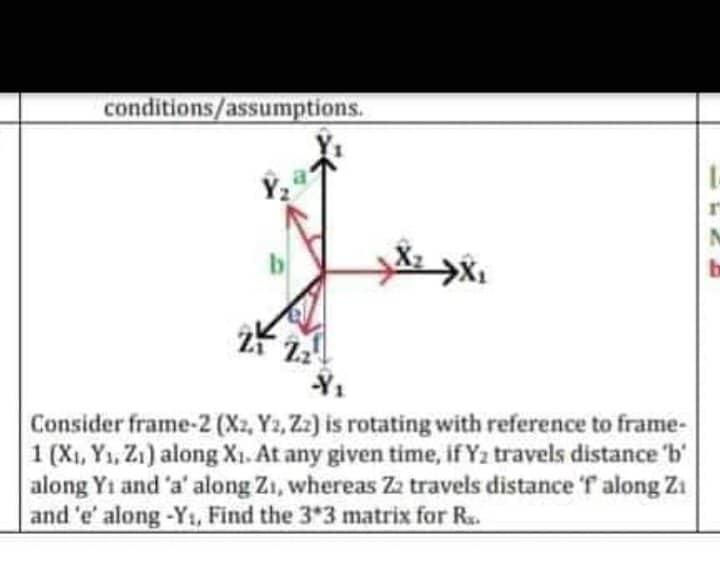
conditions/assumptions. r N >X² X₁ b Consider frame-2 (X2, Yz, Zz) is rotating with reference to frame- 1 (X₁, Y₁, Zı) along X₁. At any given time, if Yz travels distance 'b' along Yi and 'a' along Zi, whereas Z2 travels distance 'f' along Zi and 'e' along -Y₁, Find the 3*3 matrix for R.