Page 1 of 1
7. Assume that we know the transform "T, in Figure below, which describes the frame at the manipulator's fingertips (T)
Posted: Tue Jun 07, 2022 1:44 pm
by answerhappygod
- 7 Assume That We Know The Transform T In Figure Below Which Describes The Frame At The Manipulator S Fingertips T 1 (30.14 KiB) Viewed 59 times
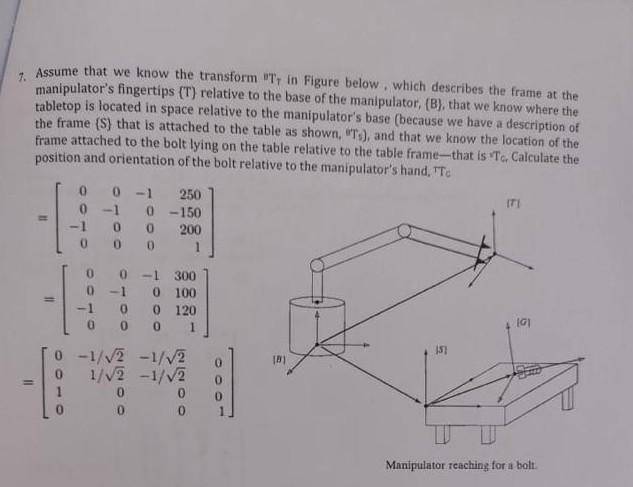
7. Assume that we know the transform "T, in Figure below, which describes the frame at the manipulator's fingertips (T) relative to the base of the manipulator, (B), that we know where the tabletop is located in space relative to the manipulator's base (because we have a description of the frame (S) that is attached to the table as shown, "Ts), and that we know the location of the frame attached to the bolt lying on the table relative to the table frame-that is Tc. Calculate the position and orientation of the bolt relative to the manipulator's hand, Tc 0 0 -1 250 (71 0 -1 0-150 0 0 200 00 0-1 300 -1 0 100 0 0 120 00 101 0 151 [8] -1/√2-1/√2 1/√2 -1/√2 0 0 0 0 Manipulator reaching for a bolt. 0 0 1 -1 0 -1 0 0