Page 1 of 1
x₂ x3 + x₂x3 + x² 1-5x15.8x2 + x₂x₂] ]+[9] y = [1 0 0]x a) Find the equilibrium point(s) of the system, assume ueq=-1. b
Posted: Tue Jun 07, 2022 11:09 am
by answerhappygod
- X X3 X X3 X 1 5x15 8x2 X X 9 Y 1 0 0 X A Find The Equilibrium Point S Of The System Assume Ueq 1 B 1 (36.68 KiB) Viewed 44 times
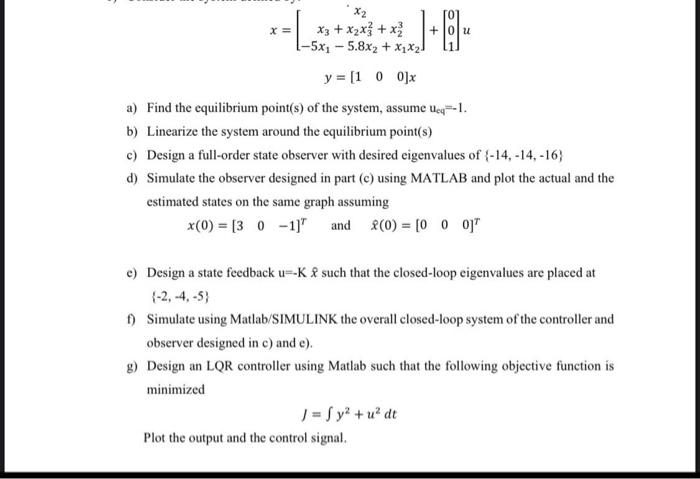
x₂ x3 + x₂x3 + x² 1-5x15.8x2 + x₂x₂] ]+[9] y = [1 0 0]x a) Find the equilibrium point(s) of the system, assume ueq=-1. b) Linearize the system around the equilibrium point(s) c) Design a full-order state observer with desired eigenvalues of {-14, -14, -16) d) Simulate the observer designed in part (c) using MATLAB and plot the actual and the estimated states on the same graph assuming x(0) = [301] and 2(0) = [0 0 oj" e) Design a state feedback u=-K & such that the closed-loop eigenvalues are placed at (-2,-4,-5) f) Simulate using Matlab/SIMULINK the overall closed-loop system of the controller and observer designed in c) and e). g) Design an LQR controller using Matlab such that the following objective function is minimized J = y² + u² dt Plot the output and the control signal. x= U