Page 1 of 1
9. Consider the control system below. The feedforward transfer function is G(s) = 4 s(s+0.5) 4 s(s+ 0.5) This system has
Posted: Tue Jun 07, 2022 9:00 am
by answerhappygod
- 9 Consider The Control System Below The Feedforward Transfer Function Is G S 4 S S 0 5 4 S S 0 5 This System Has 1 (46.69 KiB) Viewed 62 times
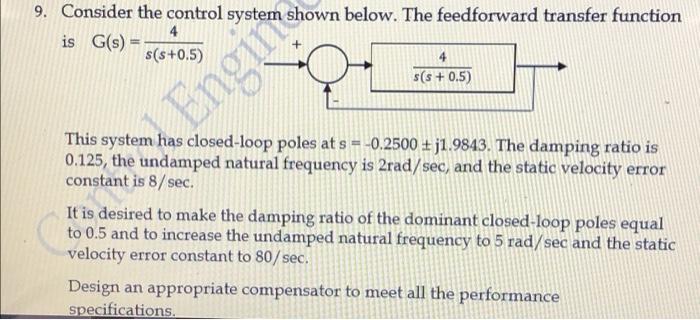
9. Consider the control system below. The feedforward transfer function is G(s) = 4 s(s+0.5) 4 s(s+ 0.5) This system has closed-loop poles at s = -0.2500 +j1.9843. The damping ratio is 0.125, the undamped natural frequency is 2rad/sec, and the static velocity error constant is 8/sec. It is desired to make the damping ratio of the dominant closed-loop poles equal to 0.5 and to increase the undamped natural frequency to 5 rad/sec and the static velocity error constant to 80/sec. Design an appropriate compensator to meet all the performance specifications. Engin