Page 1 of 1
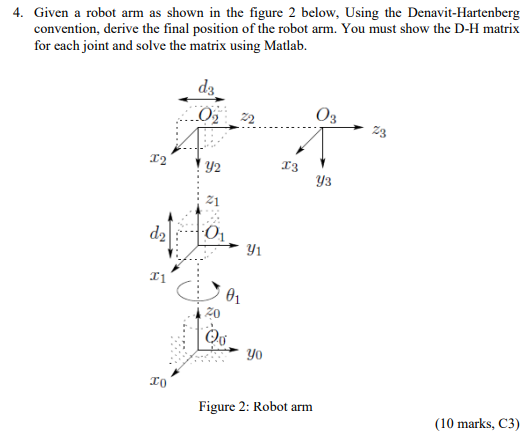
4. Given a robot arm as shown in the figure 2 below, Using the Denavit-Hartenberg convention, derive the final position
Posted: Thu Jun 02, 2022 9:53 am
by answerhappygod
- 4 Given A Robot Arm As Shown In The Figure 2 Below Using The Denavit Hartenberg Convention Derive The Final Position 1 (42.95 KiB) Viewed 31 times
4. Given a robot arm as shown in the figure 2 below, Using the Denavit-Hartenberg convention, derive the final position of the robot arm. You must show the D-H matrix for each joint and solve the matrix using Matlab. d3 0₂ 22 03 Y2 Y3 x2 d₂ I1 TO 01 91 13 20 Qu Yo Figure 2: Robot arm 23 (10 marks, C3)