Page 1 of 1
An industrial plant is governed by the the following differential equation du(t) dt +bu(t) u(t)) = 4 d³y(1) d²y(1) d13 a
Posted: Thu Jun 02, 2022 8:58 am
by answerhappygod
- An Industrial Plant Is Governed By The The Following Differential Equation Du T Dt Bu T U T 4 D Y 1 D Y 1 D13 A 1 (107.78 KiB) Viewed 29 times
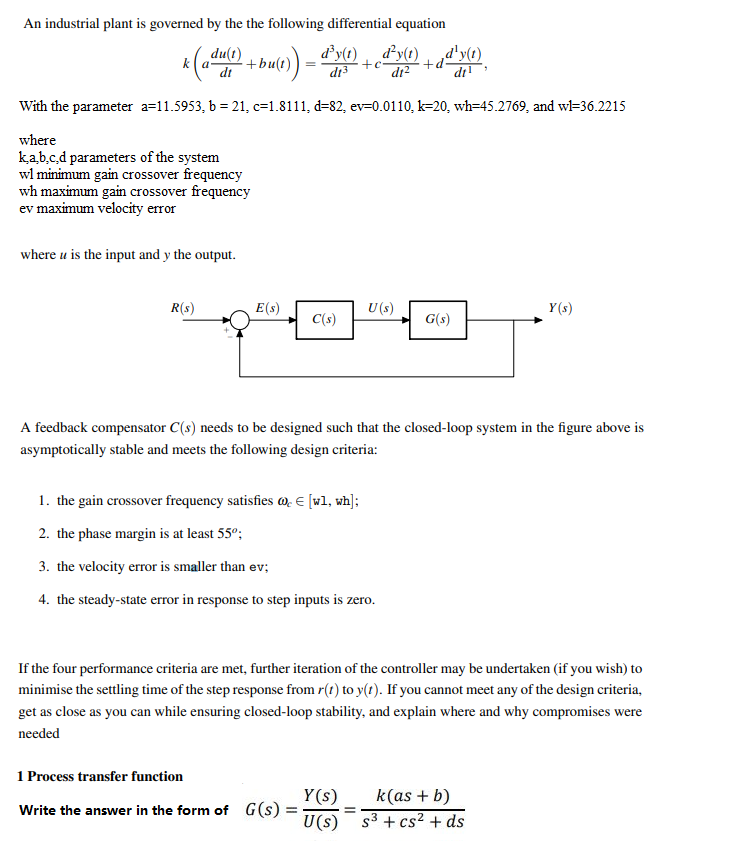
An industrial plant is governed by the the following differential equation du(t) dt +bu(t) u(t)) = 4 d³y(1) d²y(1) d13 ad'y(t), +c d1² With the parameter a=11.5953, b=21, c=1.8111, d-82, ev-0.0110, k-20, wh-45.2769, and wl-36.2215 where ka,b,c,d parameters of the system wl minimum gain crossover frequency wh maximum gain crossover frequency ev maximum velocity error where u is the input and y the output. R(s) E(s) U (s) Y(s) C(s) G(s) A feedback compensator C(s) needs to be designed such that the closed-loop system in the figure above is asymptotically stable and meets the following design criteria: 1. the gain crossover frequency satisfies @ € [wl, wh]; 2. the phase margin is at least 55º; 3. the velocity error is smaller than ev; 4. the steady-state error in response to step inputs is zero. If the four performance criteria are met, further iteration of the controller may be undertaken (if you wish) to minimise the settling time of the step response from r(t) to y(t). If you cannot meet any of the design criteria, get as close as you can while ensuring closed-loop stability, and explain where and why compromises were needed 1 Process transfer function Y(s) Write the answer in the form of G(s) = k(as + b) s³ + cs² + ds U(s) = +d²