Page 1 of 1
Example 4.4 m2 x1 yo 41,41 Z₁ 01 A A m₁ хо 20 Fig. 4.6 A two-degree-of-freedom robot arm. Using the Lagrangian method, d
Posted: Thu May 26, 2022 11:16 am
by answerhappygod
- 1 (97.4 KiB) Viewed 23 times
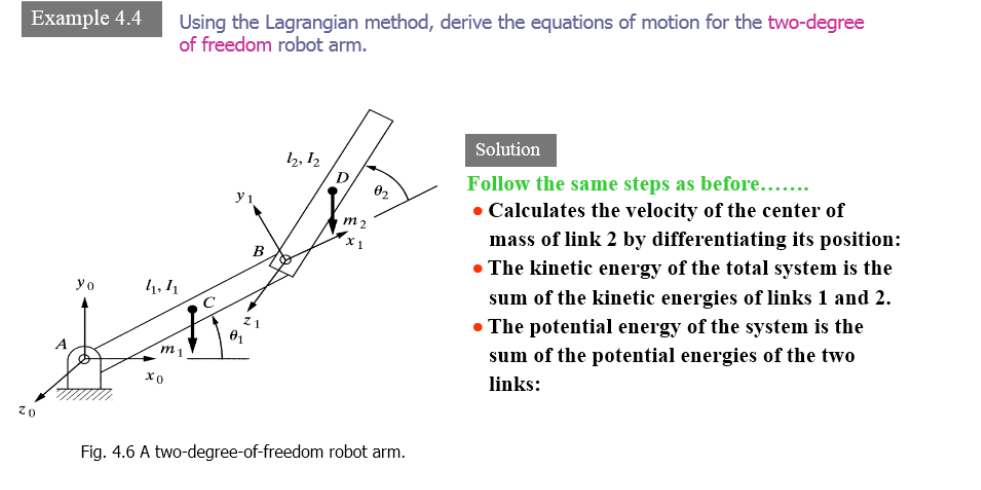
Example 4.4 m2 x1 yo 41,41 Z₁ 01 A A m₁ хо 20 Fig. 4.6 A two-degree-of-freedom robot arm. Using the Lagrangian method, derive the equations of motion for the two-degree of freedom robot arm. Solution 12,12 Follow the same steps as before....... • Calculates the velocity of the center of mass of link 2 by differentiating its position: • The kinetic energy of the total system is the sum of the kinetic energies of links 1 and 2. • The potential energy of the system is the sum of the potential energies of the two links: с B D 02