Page 1 of 1
A model of a robotic arm control is shown by the block diagram. Showing all the steps Tune the PD controller to achieve
Posted: Thu May 26, 2022 11:08 am
by answerhappygod
- A Model Of A Robotic Arm Control Is Shown By The Block Diagram Showing All The Steps Tune The Pd Controller To Achieve 1 (55.14 KiB) Viewed 29 times
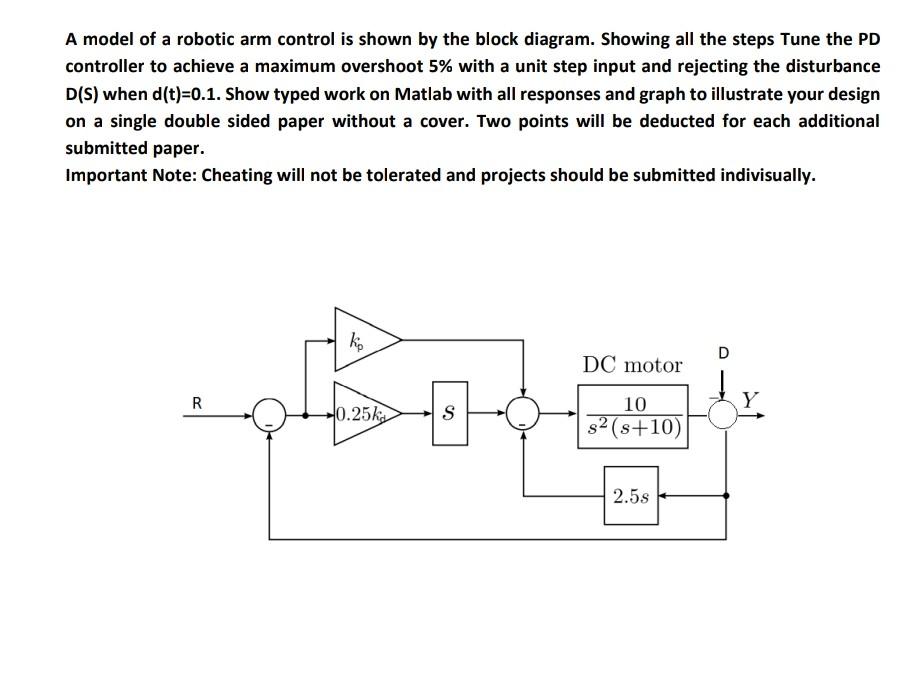
A model of a robotic arm control is shown by the block diagram. Showing all the steps Tune the PD controller to achieve a maximum overshoot 5% with a unit step input and rejecting the disturbance D(S) when d(t)=0.1. Show typed work on Matlab with all responses and graph to illustrate your design on a single double sided paper without a cover. Two points will be deducted for each additional submitted paper. Important Note: Cheating will not be tolerated and projects should be submitted indivisually. kp D DC motor R 10 0.25k s² (s+10) 2.5s S Y