Page 1 of 1
A controller designed to maintain the relative position of one car with respect to another as part of an intelligent cru
Posted: Tue May 24, 2022 9:01 am
by answerhappygod
- A Controller Designed To Maintain The Relative Position Of One Car With Respect To Another As Part Of An Intelligent Cru 1 (80.58 KiB) Viewed 20 times
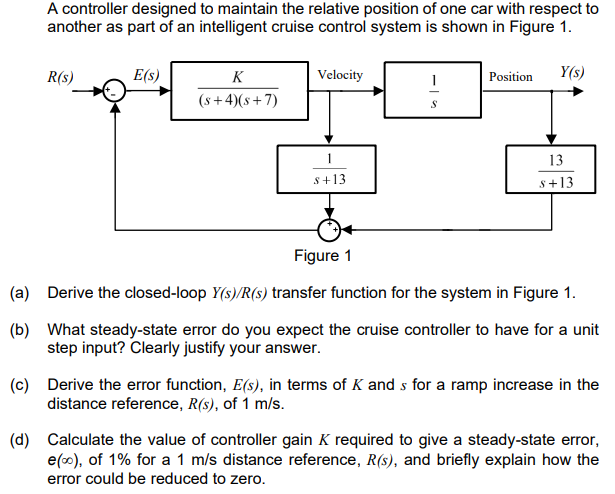
A controller designed to maintain the relative position of one car with respect to another as part of an intelligent cruise control system is shown in Figure 1. R(S) E(s) K Velocity Position Y(s) (s+4)(s+7) S 13 s +13 s +13 Figure 1 (a) Derive the closed-loop Y(s)/R(s) transfer function for the system in Figure 1. (b) What steady-state error do you expect the cruise controller to have for a unit step input? Clearly justify your answer. (c) Derive the error function, E(s), in terms of K and s for a ramp increase in the distance reference, R(s), of 1 m/s. (d) Calculate the value of controller gain K required to give a steady-state error, e(), of 1% for a 1 m/s distance reference, R(s), and briefly explain how the error could be reduced to zero.