- The State Of The Simulated Vehicle Is Composed By Is Position 2 Y And Orientation As Well As Its Linear And Angula 1 (188.53 KiB) Viewed 29 times
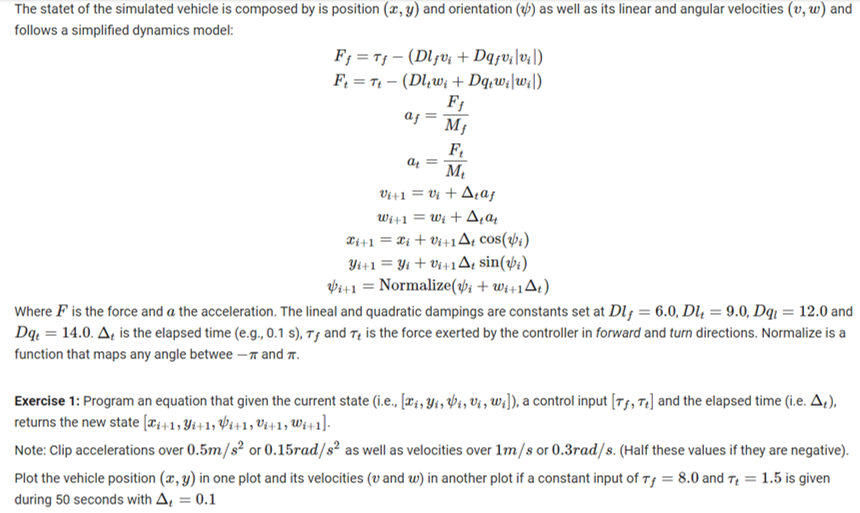
The state of the simulated vehicle is composed by is position (2, y) and orientation () as well as its linear and angular velocities (v, w) and follows a simplified dynamics model: F; = Ti - (DjV; + Davi|vil) Fe = T1 - (D1_w; + Dą.w|wk| Fj aj M ay = F M Vf+1 = 0 + Ata Wi+1 = w; + A, a 21+1 = 8; + 0x+1A, cos(i) Yi+1 = Yi + V4+1 A, sin(3) Pi+1 = Normalize($i + Wi+1A) Where F is the force and a the acceleration. The lineal and quadratic dampings are constants set at Dl; = 6.0, Dų = 9.0, Dq = 12.0 and Dq+ = 14.0. A is the elapsed time (e.g., 0.1 s), Tg and T4 is the force exerted by the controller in forward and turn directions. Normalize is a function that maps any angle betwee – and T. Exercise 1: Program an equation that given the current state (i.e., [Wi, Yi, Vi, Vi, wz]), a control input (Tf, 7+] and the elapsed time (i.e. Ac). returns the new state (x1+1,91+1, Vi+1, Vi+1, W:+1). Note: Clip accelerations over 0.5m/s2 or 0.15rad/s as well as velocities over 1m/s or 0.3rad/s. (Half these values if they are negative). Plot the vehicle position (x, y) in one plot and its velocities (v and w) in another plot if a constant input of Tj = 8.0 and T4 = 1.5 is given during 50 seconds with A, = 0.1