Page 1 of 1
The following transfer functions describe the plant of a closed loop system with a step input as reference signal and un
Posted: Sat May 21, 2022 1:49 am
by answerhappygod
- The Following Transfer Functions Describe The Plant Of A Closed Loop System With A Step Input As Reference Signal And Un 1 (59.32 KiB) Viewed 22 times
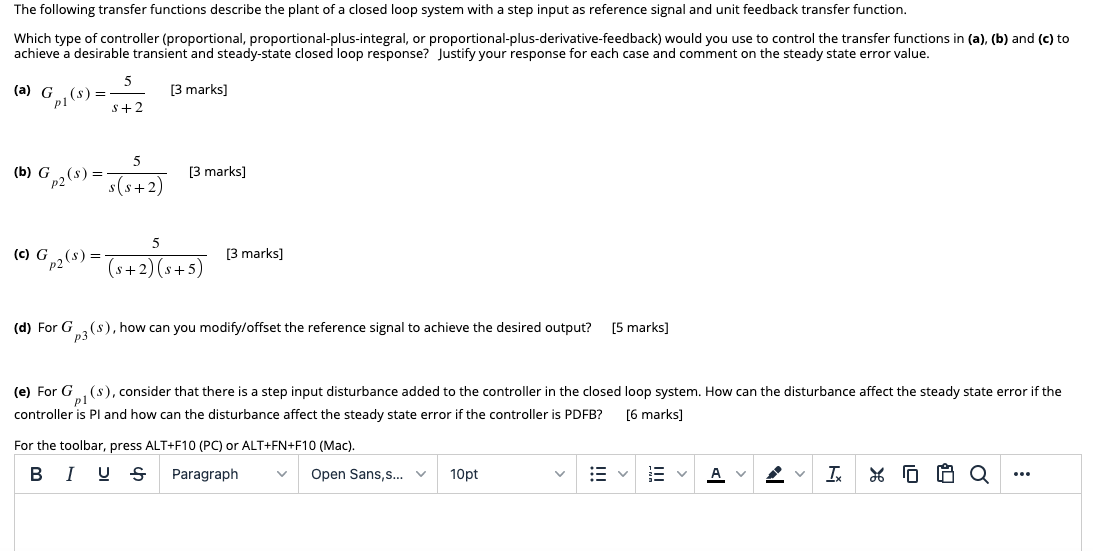
The following transfer functions describe the plant of a closed loop system with a step input as reference signal and unit feedback transfer function. Which type of controller (proportional, proportional-plus-integral, or proportional-plus-derivative feedback) would you use to control the transfer functions in (a), (b) and (c) to achieve a desirable transient and steady-state closed loop response? Justify your response for each case and comment on the steady state error value. [3 marks] (a) G (S) = pl $ +2 (b) G 0,2(9) =-(-42) 13 marks] (c) G © »($) = 5+ 2) (4+5) = [3 marks] (+5) (d) For G p3(8), how can you modify/offset the reference signal to achieve the desired output? [5 marks] (e) For G pl(s), consider that there is a step input disturbance added to the controller in the closed loop system. How can the disturbance affect the steady state error if the controller is Pl and how can the disturbance affect the steady state error if the controller is PDFB? [6 marks] For the toolbar, press ALT+F10 (PC) or ALT+FN+F10 (Mac). B I U Ꭶ Paragraph Open Sans, s... V 10pt 日 А м TX 4 G Q