Page 1 of 1
16. A compensated motor position control system is shown in Fig. 4.31. As- sume that the sensor dynamics are H(8) = 1. (
Posted: Sat May 21, 2022 12:26 am
by answerhappygod
- 16 A Compensated Motor Position Control System Is Shown In Fig 4 31 As Sume That The Sensor Dynamics Are H 8 1 1 (24.28 KiB) Viewed 25 times
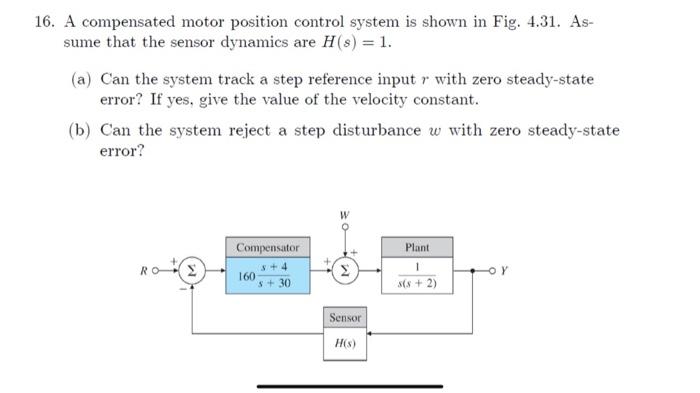
16. A compensated motor position control system is shown in Fig. 4.31. As- sume that the sensor dynamics are H(8) = 1. (a) Can the system track a step reference input r with zero steady-state error? If yes, give the value of the velocity constant. (b) Can the system reject a step disturbance w with zero steady-state error? w Compensator Plant Σ Σ 1 160 5 + 30 (8 + 2) Sensor H(S)