Page 1 of 1
11. Consider the system shown in Fig. 4.29 which represents control of the angle of a pendulum that has no damping, (a)
Posted: Sat May 21, 2022 12:26 am
by answerhappygod
- 11 Consider The System Shown In Fig 4 29 Which Represents Control Of The Angle Of A Pendulum That Has No Damping A 1 (29.04 KiB) Viewed 31 times
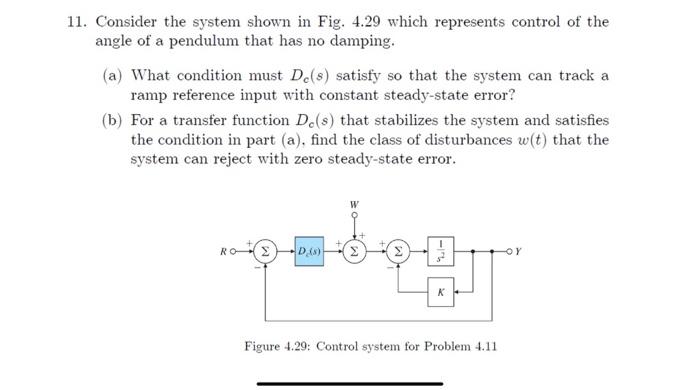
11. Consider the system shown in Fig. 4.29 which represents control of the angle of a pendulum that has no damping, (a) What condition must Dc(s) satisfy so that the system can track a ramp reference input with constant steady-state error? (b) For a transfer function Do(s) that stabilizes the system and satisfies the condition in part (a), find the class of disturbances w(t) that the system can reject with zero steady-state error. Ro-Σ D(8) Σ (Σ K Figure 4.29: Control system for Problem 4.11