Page 1 of 1
R(S) Problem-1. Design a Lag Compensator so that the negative C(s) feedback control system given, where Gc(s) Gp(s) K(s
Posted: Fri May 20, 2022 10:47 pm
by answerhappygod
- R S Problem 1 Design A Lag Compensator So That The Negative C S Feedback Control System Given Where Gc S Gp S K S 1 (145.59 KiB) Viewed 30 times
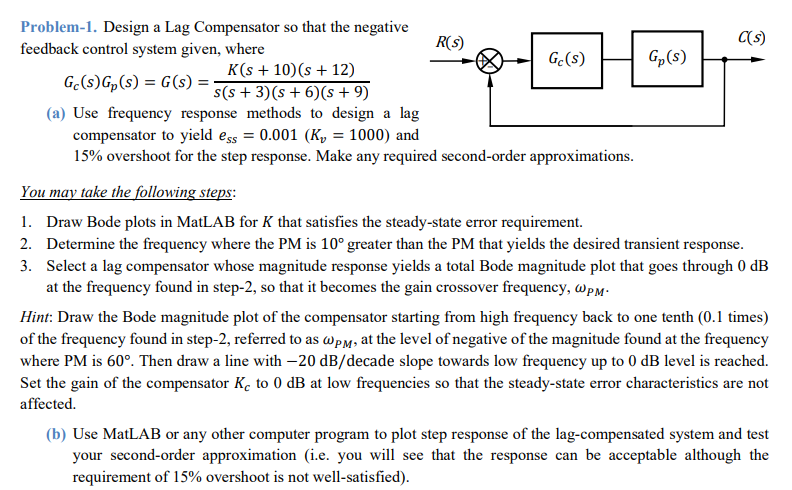
R(S) Problem-1. Design a Lag Compensator so that the negative C(s) feedback control system given, where Gc(s) Gp(s) K(s + 10) (s + 12) G(S) Gp(s) = G(s) = s(s + 3)(s + 6)(s +9) (a) Use frequency response methods to design a lag compensator to yield ess = 0.001 (K, = 1000) and 15% overshoot for the step response. Make any required second-order approximations. You may take the following steps: 1. Draw Bode plots in MatLAB for K that satisfies the steady-state error requirement. 2. Determine the frequency where the PM is 10° greater than the PM that yields the desired transient response. 3. Select a lag compensator whose magnitude response yields a total Bode magnitude plot that goes through 0 dB at the frequency found in step-2, so that it becomes the gain crossover frequency, wpm. Hint: Draw the Bode magnitude plot of the compensator starting from high frequency back to one tenth (0.1 times) of the frequency found in step-2, referred to as Wpm, at the level of negative of the magnitude found at the frequency where PM is 60°. Then draw a line with –20 dB/decade slope towards low frequency up to 0 dB level is reached. Set the gain of the compensator Kc to 0 dB at low frequencies so that the steady-state error characteristics are not affected. (b) Use MatLAB or any other computer program to plot step response of the lag-compensated system and test your second-order approximation (i.e. you will see that the response can be acceptable although the requirement of 15% overshoot is not well-satisfied).