Page 1 of 1
The state-space model of a mechatronic system is given below + 101 = [1] 2.1 x6+]u(e) y(t) = [0 11830) (a) First, determ
Posted: Fri May 20, 2022 10:25 pm
by answerhappygod
- The State Space Model Of A Mechatronic System Is Given Below 101 1 2 1 X6 U E Y T 0 11830 A First Determ 1 (78.85 KiB) Viewed 21 times
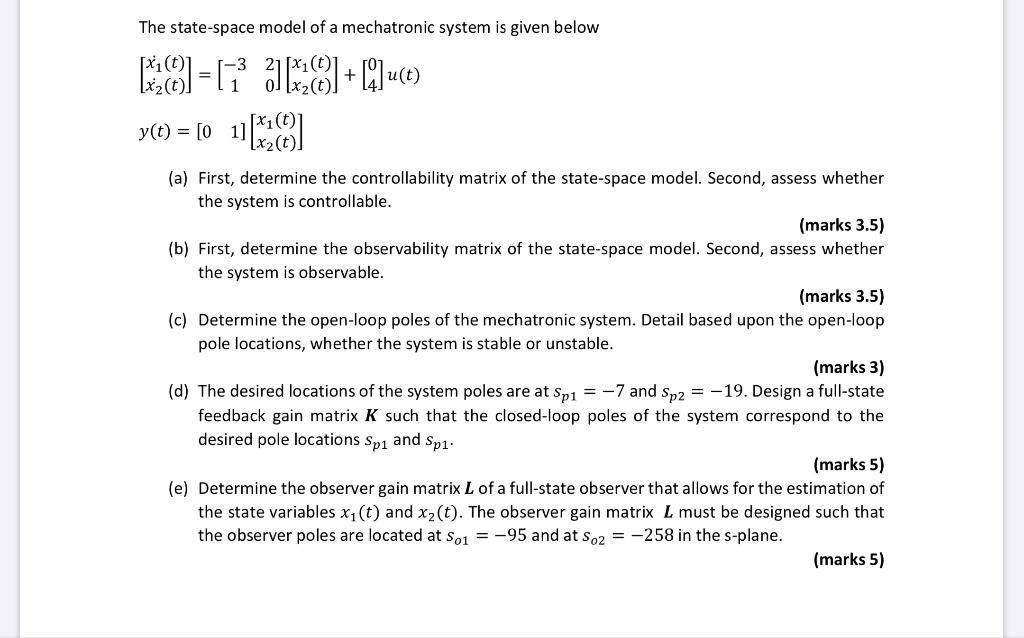
The state-space model of a mechatronic system is given below + 101 = [1] 2.1 x6+]u(e) y(t) = [0 11830) (a) First, determine the controllability matrix of the state-space model. Second, assess whether the system is controllable. (marks 3.5) (b) First, determine the observability matrix of the state-space model. Second, assess whether the system is observable. (marks 3.5) (c) Determine the open-loop poles of the mechatronic system. Detail based upon the open-loop pole locations, whether the system is stable or unstable. (marks 3) (d) The desired locations of the system poles are at spi = -7 and Sp2 = -19. Design a full-state feedback gain matrix K such that the closed-loop poles of the system correspond to the desired pole locations Sp1 and Spi. (marks 5) (e) Determine the observer gain matrix L of a full-state observer that allows for the estimation of the state variables xi(t) and xz(t). The observer gain matrix L must be designed such that the observer poles are located at 8.1 = -95 and at So2 = -258 in the s-plane. (marks 5)