Page 1 of 1
Root Locus Automatic control of helicopters is necessary because, unlike fixed-wing aircraft which possess a fair degree
Posted: Fri May 20, 2022 10:08 pm
by answerhappygod
- Root Locus Automatic Control Of Helicopters Is Necessary Because Unlike Fixed Wing Aircraft Which Possess A Fair Degree 1 (68.52 KiB) Viewed 33 times
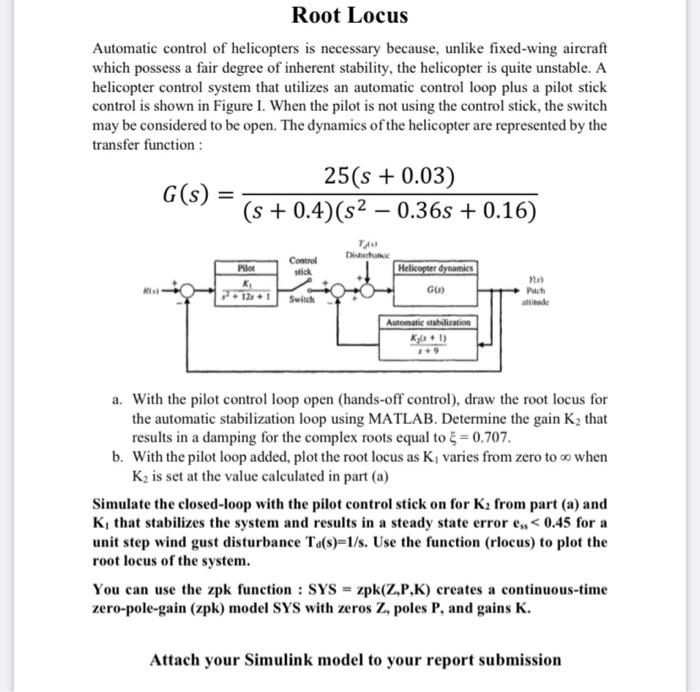
Root Locus Automatic control of helicopters is necessary because, unlike fixed-wing aircraft which possess a fair degree of inherent stability, the helicopter is quite unstable. A helicopter control system that utilizes an automatic control loop plus a pilot stick control is shown in Figure 1. When the pilot is not using the control stick, the switch may be considered to be open. The dynamics of the helicopter are represented by the transfer function : 25(s + 0.03) G(S) (s + 0.4)(s2 – 0.36s + 0.16) TAU Dista Pilor Control stick Helicopter dynamics PX) Pach 123 + 1 GG Switch Automatic stabilization K30+1) a. With the pilot control loop open (hands-off control), draw the root locus for the automatic stabilization loop using MATLAB. Determine the gain K, that results in a damping for the complex roots equal to g = 0.707. b. With the pilot loop added, plot the root locus as K, varies from zero to co when K is set at the value calculated in part (a) Simulate the closed-loop with the pilot control stick on for Kz from part (a) and K, that stabilizes the system and results in a steady state error es < 0.45 for a unit step wind gust disturbance Te(s)=1/s. Use the function (rlocus) to plot the root locus of the system. You can use the zpk function : SYS = zpk(Z.P.K) creates a continuous-time zero-pole-gain (zpk) model SYS with zeros Z, poles P, and gains K. Attach your Simulink model to your report submission