Page 1 of 1
Design Problem: A negative unity feedback control system has again motion sensor L(S), L(s) = where K is a constant, and
Posted: Fri May 20, 2022 9:22 pm
by answerhappygod
- Design Problem A Negative Unity Feedback Control System Has Again Motion Sensor L S L S Where K Is A Constant And 1 (33.3 KiB) Viewed 40 times
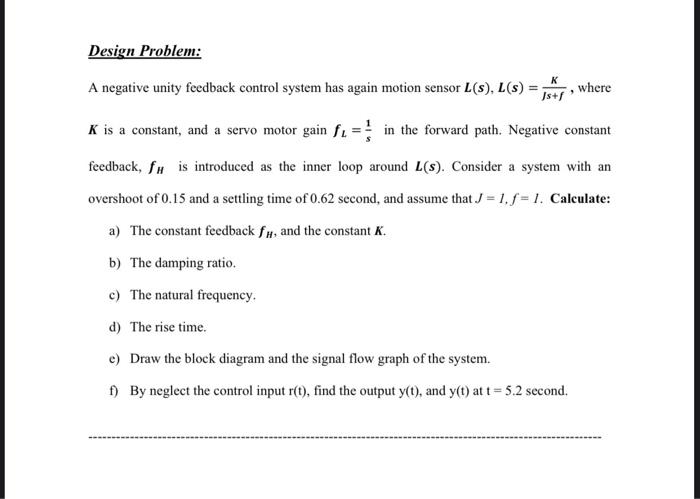
Design Problem: A negative unity feedback control system has again motion sensor L(S), L(s) = where K is a constant, and a servo motor gain fua in the forward path. Negative constant feedback, fu is introduced as the inner loop around L(s). Consider a system with an overshoot of 0.15 and a settling time of 0.62 second, and assume that J = 1,1=1. Calculate: a) The constant feedback f#, and the constant K. b) The damping ratio. c) The natural frequency d) The rise time. e) Draw the block diagram and the signal flow graph of the system. f) By neglect the control input r(t), find the output y(t), and y(t) at t=5.2 second.