Page 1 of 1
5 (a) Show method to adjust Kp.KI,Kd of the system with CHR and write down the PID diagram with Simulink (least overshoo
Posted: Fri May 20, 2022 7:00 pm
by answerhappygod
- 5 A Show Method To Adjust Kp Ki Kd Of The System With Chr And Write Down The Pid Diagram With Simulink Least Overshoo 1 (77.25 KiB) Viewed 48 times
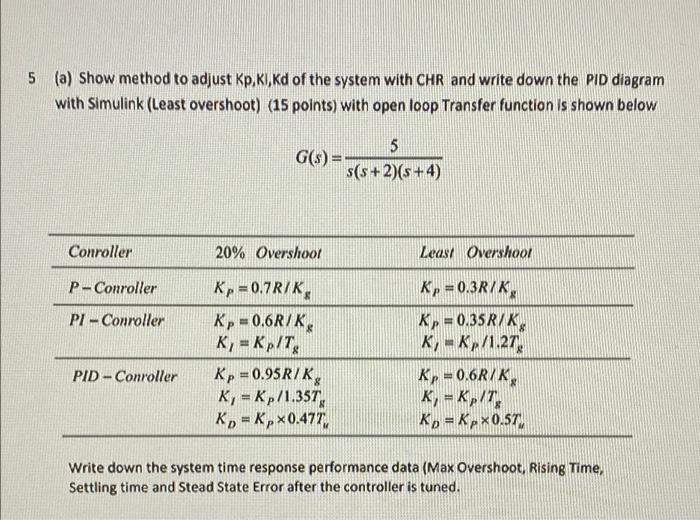
5 (a) Show method to adjust Kp.KI,Kd of the system with CHR and write down the PID diagram with Simulink (least overshoot) (15 points) with open loop Transfer function is shown below 5 G(s) = $(s + 2)(s+4) Conroller 20% Overshool Least Overshool P-Conroller PI-Conroller Kp =0.7R/K, K, -0.6R/K, K, =Kp/T Kp = 0.95R/K, K, -Kp/1.357) Ko = Kox0.477 Kp =0.3RIK K, = 0.35RIK, K-K/1.27 K, -0.6R/KA K) = K, T. Ko = KpX0.57M PID-Conroller Write down the system time response performance data (Max Overshoot, Rising Time, Settling time and Stead State Error after the controller is tuned.