- With Many Next Generation Cars Having Self Driving Technology Autopilot And Assuming Compliance With Asimov S Laws Of 1 (97.65 KiB) Viewed 55 times
- With Many Next Generation Cars Having Self Driving Technology Autopilot And Assuming Compliance With Asimov S Laws Of 2 (72.92 KiB) Viewed 55 times
- With Many Next Generation Cars Having Self Driving Technology Autopilot And Assuming Compliance With Asimov S Laws Of 3 (15.54 KiB) Viewed 55 times
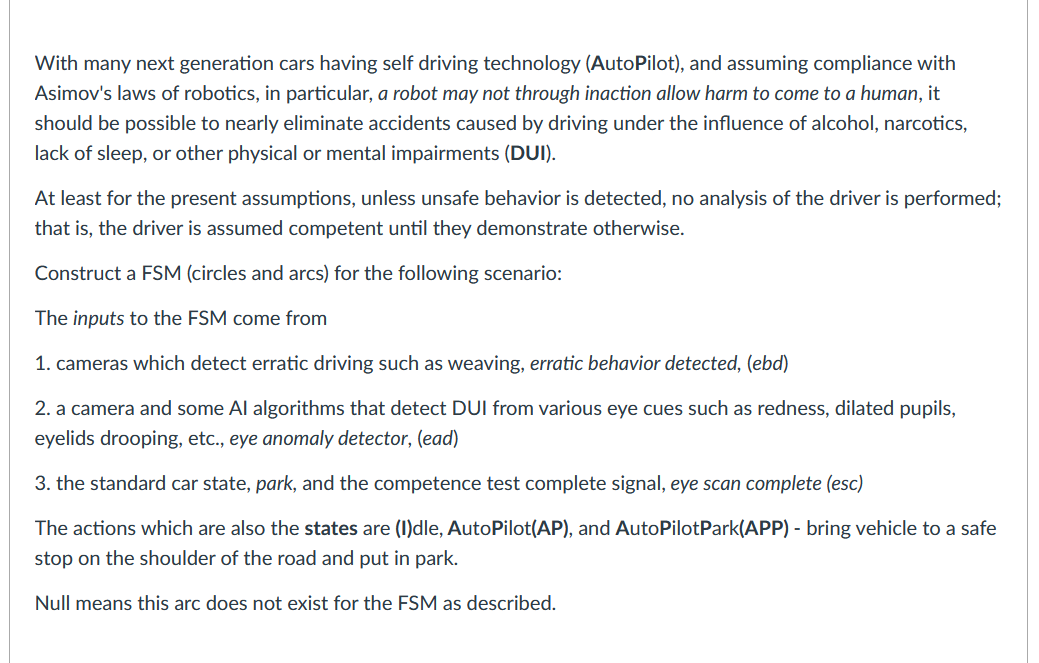
With many next generation cars having self driving technology (AutoPilot), and assuming compliance with Asimov's laws of robotics, in particular, a robot may not through inaction allow harm to come to a human, it should be possible to nearly eliminate accidents caused by driving under the influence of alcohol, narcotics, lack of sleep, or other physical or mental impairments (DUI). At least for the present assumptions, unless unsafe behavior is detected, no analysis of the driver is performed; that is, the driver is assumed competent until they demonstrate otherwise. Construct a FSM (circles and arcs) for the following scenario: The inputs to the FSM come from 1. cameras which detect erratic driving such as weaving, erratic behavior detected, (ebd) 2. a camera and some Al algorithms that detect DUI from various eye cues such as redness, dilated pupils, eyelids drooping, etc., eye anomaly detector, (ead) 3. the standard car state, park, and the competence test complete signal, eye scan complete (esc) The actions which are also the states are (I)dle, AutoPilot(AP), and AutoPilotPark(APP) - bring vehicle to a safe stop on the shoulder of the road and put in park. Null means this arc does not exist for the FSM as described.
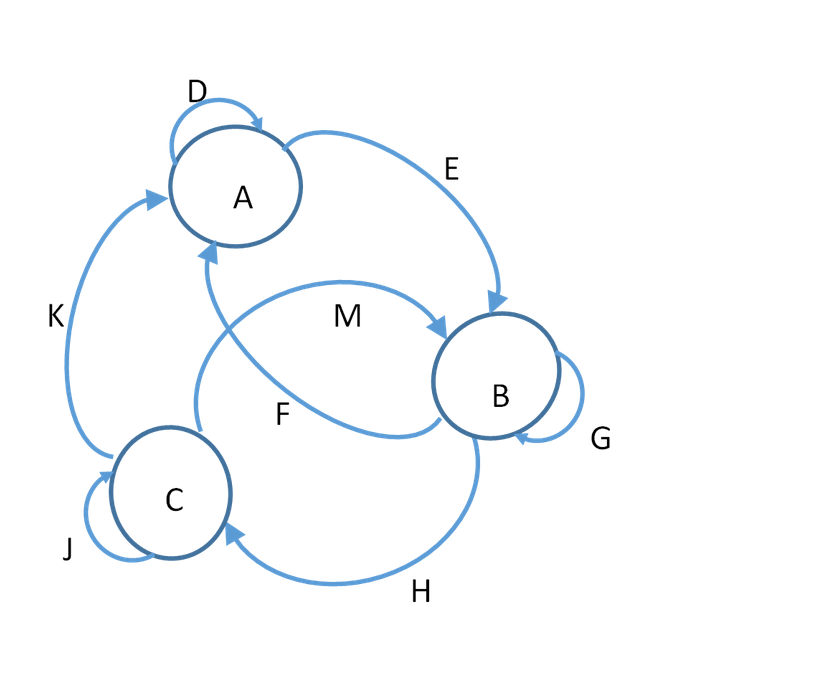
D E A K K M B. F G () С H Н.
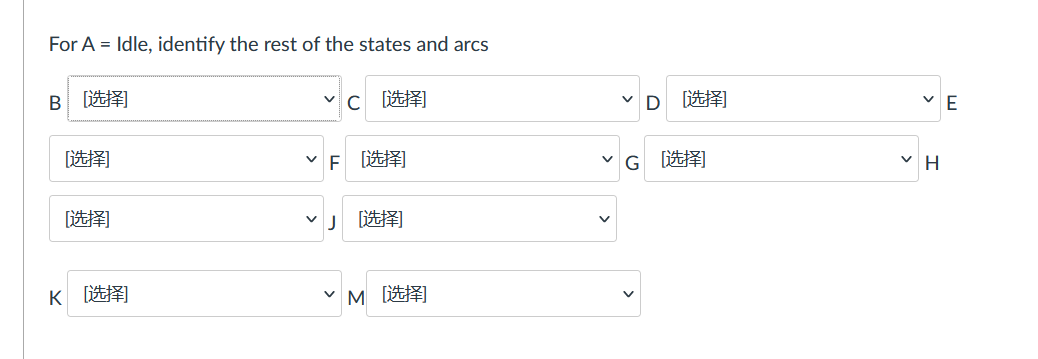
For A = Idle, identify the rest of the states and arcs B 选择 VC 选择 vp 选 v E VF 选择 vs 选择 V H 选 选择 K 选择 v M选