Page 1 of 1
QUESTION 2 The 3-DOF (RPR) robot shown in the figure below with its tº matrix. However, there a need to attach a Gripper
Posted: Wed May 18, 2022 4:46 pm
by answerhappygod
- Question 2 The 3 Dof Rpr Robot Shown In The Figure Below With Its To Matrix However There A Need To Attach A Gripper 1 (56.07 KiB) Viewed 50 times
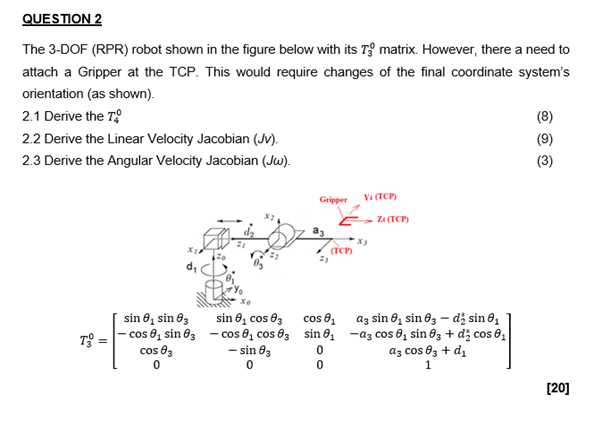
QUESTION 2 The 3-DOF (RPR) robot shown in the figure below with its tº matrix. However, there a need to attach a Gripper at the TCP. This would require changes of the final coordinate system's orientation (as shown). 2.1 Derive the To 2.2 Derive the Linear Velocity Jacobian (JV). 2.3 Derive the Angular Velocity Jacobian (Jw). (3) Gripper Y(TCP) ZA (TCP) (TCP) 120 sin , sin 03 T3 = -cos 8, sin cos 63 sin , cos 83 cose, az sin, sin 83 - disin -cos, cos 03 sin e, -az cose, sin 83 + dj cos e - sin 83 0 az cos 3 + di 0 0 0 1 [20]