Page 1 of 1
Da, is used for controller tuning. The derived PID settings, such as Kc, t, and Tp, normally d Problem 6. In the direct
Posted: Mon May 16, 2022 2:00 pm
by answerhappygod
- Da Is Used For Controller Tuning The Derived Pid Settings Such As Kc T And Tp Normally D Problem 6 In The Direct 1 (225.92 KiB) Viewed 46 times
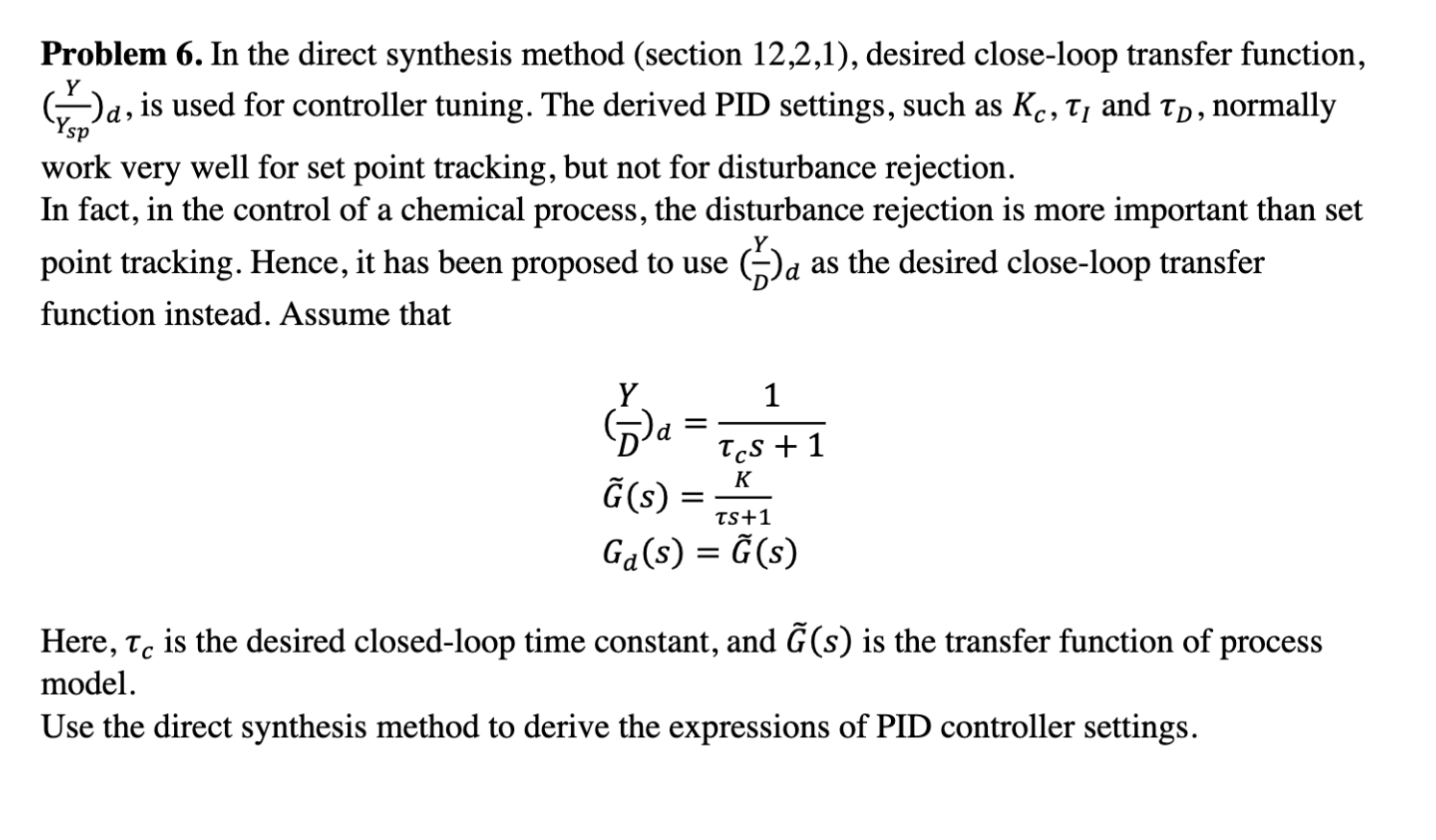
Da, is used for controller tuning. The derived PID settings, such as Kc, t, and Tp, normally d Problem 6. In the direct synthesis method (section 12,2,1), desired close-loop transfer function, τι “Үѕр work very well for set point tracking, but not for disturbance rejection. In fact, in the control of a chemical process, the disturbance rejection is more important than set point tracking. Hence, it has been proposed to use d a as the desired close-loop transfer function instead. Assume that = 1 TCS +1 K Ĝ(s) = Ga(s) = Ĝ(s) = TS+1 Here, Tc is the desired closed-loop time constant, and Ĝ(s) is the transfer function of process model. Use the direct synthesis method to derive the expressions of PID controller settings.