Page 1 of 1
A schematic design of a cable-driven robotic joint assembly is shown in Figure QA3. Robot join assembly Effort (to the a
Posted: Mon May 16, 2022 6:21 am
by answerhappygod
- A Schematic Design Of A Cable Driven Robotic Joint Assembly Is Shown In Figure Qa3 Robot Join Assembly Effort To The A 1 (66.28 KiB) Viewed 60 times
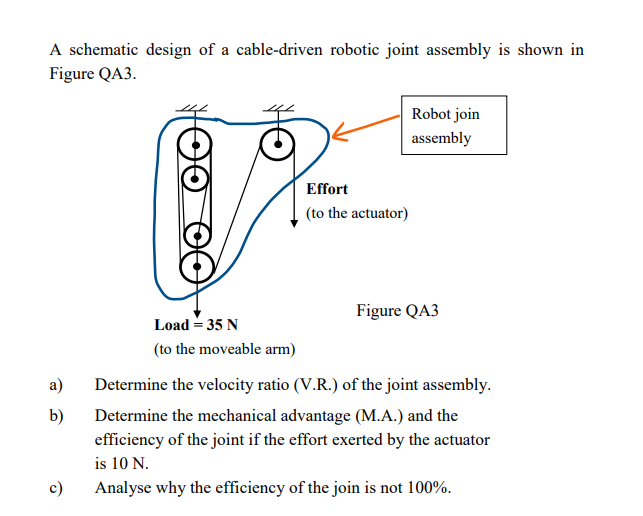
A schematic design of a cable-driven robotic joint assembly is shown in Figure QA3. Robot join assembly Effort (to the actuator) a) b) Figure QA3 Load = 35 N (to the moveable arm) Determine the velocity ratio (V.R.) of the joint assembly. Determine the mechanical advantage (M.A.) and the efficiency of the joint if the effort exerted by the actuator is 10 N. Analyse why the efficiency of the join is not 100%. c)